多传感器智能轮椅的硬件系统设计
2.1 超声传感器与接近开关
本超声波测距系统共有8个超声波传感器,组成超声波传感器阵列,分别置于轮椅四周各两个。为了检测到一些被超声波传感器遗漏或未能及时处理的障碍,还要在轮椅四周加装四个电感式接近开关。障碍物碰到防撞橡胶圈引起金属条发生变形,产生垂直方向上的位移,触发接近开关动作,得到一个开关信号(中断请求信号),使移动机器人立即停止运行。
超声波环境探测电路主要由多路模拟开关、升压放大电路、缓冲放大整形电路和超声波换能器等环节构成,如图2所示。

升压放大电路和超声波发射换能器组成了超声波发射部分。发射过程是:首先由DSP的脉宽调制通道产生一定脉宽的调制脉冲波,经变压器升压放大电路后产生一个瞬间的高能信号,激发超声波发射换能器产生超声波信号。需要注意的是,超声波在发射的瞬间,有部分声波会直接进入超声波接收端,从而产生很强的虚假反射波,造成所谓的振铃现象。为了避免振铃,需要进行软件延时处理,从而导致探测盲区。在程序处理上,就是在DSP发射激励脉冲波以后一段时间内将相应的CAP中断关闭,盲区间隔过了以后再将CAP中断打开。超声波的接收部分必须与发射部分协调一致地工作,才能保证信号准确灵敏地接收。此部分主要由超声波接收换能器、放大滤波、整形触发输出电路组成。由于在超声波传播中,其能量会随着传播距离的增大而减小,从远距离障碍物反射回的回波信号一般比较弱,所以需要经过多级信号放大处理后才能够被DSP中断输入端口检测到。
2.2 编码器
在智能轮椅系统中,除了要对环境的距离信息进行测量,有时还要对方位信息进行有效的观测或者估计。对于大多数的室内移动机器人系统而言,方位信息一般是通过码盘信息间接估计得出的,本系统也采用这种方法。通过计算从码盘读出的信息得出结果,代价是需要一定的计算时间。
在TMS324LF2407A芯片上有两个时间管理模块(EV),每个EV模块都有一个正交编码脉冲电路,使用该电路后,在两个相应引脚上即可输入正交编码脉冲。该电路可用于连接光电码盘以获得旋转机械的位置和速率等信息,但需要注意的是,此时必须禁止相应引脚上的捕获功能。
正交编码脉冲电路的时序可由通用定时器2(或通用定时器4,EVB模块)提供,通用定时器必须设置成定向增/减模式,并且以正交编码脉冲电路作为时钟源。
正交编码脉冲是两个频率变化且正交(相位相差90°)的脉冲,它由电机轴上的光电编码器产生,码盘在电机轴上并且有许多空线槽,可以透光,当电机带动码盘转动时,如果发光二极管发出的光被挡住,那么后面的光电传感器就接收不到信号,然后光电传感器发出一个低电平脉冲,即“0”,如果旋转位置正好使得光源可以透光线槽,那么光电传感器感应到信号,就发出一个高电平脉冲,即“1”。
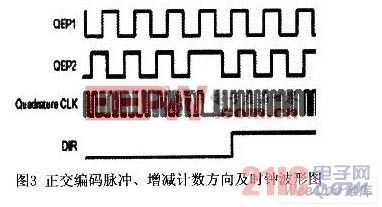
正交编码脉冲电路的方向检测逻辑决定了两个脉冲序列中哪一个是先导序列,接着它就产生方向信号作为通用定时器的计数方向输入,两列正交输入脉冲的两个边沿都被正交脉冲编码电路计数,因此,产生的时钟频率是每个输入序列的4倍,且把这个时钟作为通用定时器2或4的输入时钟。图3给出了正交编码脉冲、增减计数方向及时钟的波形。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码