基于Simulink仿真的用户星天线控制系统分析
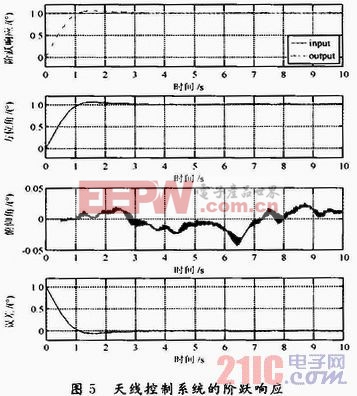
图5为天线控制系统的阶跃响应,可以看出,在接收机输出信号干扰较大的情况下,天线控制系统能较好地跟随目标。方位轴角度变化与θ一致,俯仰轴角度在零值附近,天线转动角度能跟随给定θ,说明所建立的仿真模型能实现天线控制系统的功能。在初始角度偏差较大时,模式选择模块选择程控模式,控制器作用电机以限定的最高转速运行,使偏差快速减小。当角度误差小于0.4°时,牵引转入自动跟踪模式,控制器根据接收机输出的方位、俯仰误差电压控制电机转速增大或减小,使偏差进一步减小,最终达到稳定状态,稳态时的跟踪误差低于0.05°。
天线控制系统要求跟踪精度低于0.05°,因此给定输入为斜坡信号,角速度为0.25(°)/s,系统的输出响应及误差曲线如图6所示。
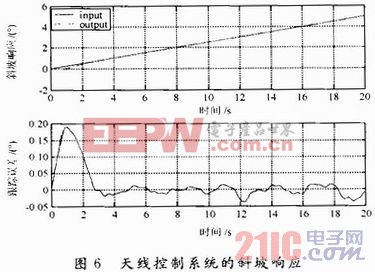
从图6可以看出,系统稳定时的跟踪误差低于0.05°,满足天线控制系统的指向精度要求。
3 结语
在对天线控制系统各组成部分进行分析的基础上,在Simulink环境下完成了天线控制系统的仿真模型,所搭建的仿真模型能实现天线控制系统的各个功能,并能准确地跟随目标,跟踪误差低于0.05°,满足天线控制系统的指向精度要求,证明了所设计的天线指向控制系统的有效性,为进一步研究天线控制系统的抗干扰性能提供了基础。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码