一种差速驱动小车曲线行走方法
由图2可知,Oc是小车的速度瞬心,在低速运动时忽略横滑影响,根据运动学的知识可知C点的速度VC的大小为:
VC=(V1+V2)/2 (1)
假设小车车体的角速度为ω,如图2所示的情况为做顺时针运动,因此有:
根据刚体平动原理,小车在任意时刻的运动都可以看成是绕车体瞬心OC的转动,转动半径R为:
由V1,V2之间的三种关系决定了差速驱动小车的三种运动方式:
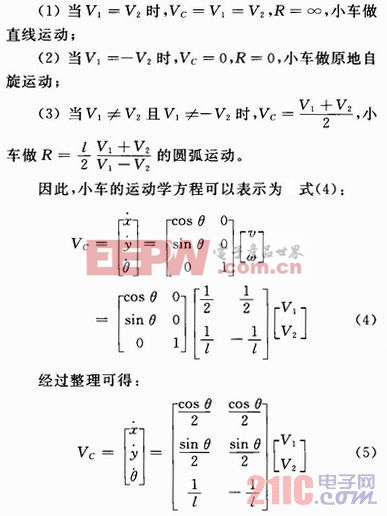
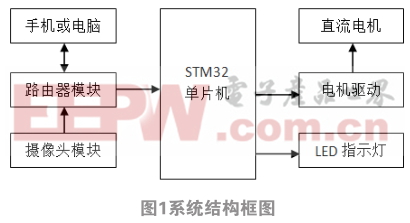
由以上分析可知,文中设计的差速驱动小车为全局可控系统,通过控制两步进电机输入脉冲频率,间接控制小车的线速度VC和角速度ω,理论上可以实现小车在任意位姿的运动;同时由于系统存在约束条件
3 曲线行走实现
根据对差速驱动小车的运动学分析,在正常工作情况下,小车可以进行直线或圆弧运动,如果要使小车按照给定曲线运动,则考虑利用圆弧去近似曲线轨迹。
3.1 曲线曲率半径计算
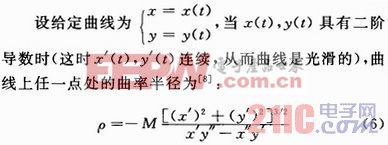
式中:M是转向系数,当曲线上的点按逆时针转时,M=+1;当按顺时针转时,M=-1。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码