外国牛人教你一步步快速打造首台机器人
一台可以上网的电脑,同时有空余的USB接口

可以使Mac,Linux或者家用电脑。适用于这个的软件是免费的。
尽管不是必须的,但最好拥有的工具
万用表、剥线钳、螺丝刀。

准备好了么?让我们开始制造一个机器人
将排针插进洞里!
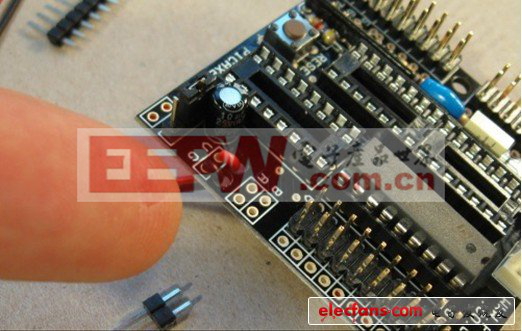
首先打开的开发板(我确信你已经做了这道工序);然后你会看到有些红色填充物在其下面,这是在其制造的时候便安放在那里的了。他们把元器件安放在向上的那一年,然后将板的向下那一面浸在热的焊接物里面。那些不想被焊接物接触到的地方,早就已经放了那些红色填充物。因此主需要将它拿开。
让我们确认一下我们将要插排针的地方:马达输出,板上的AB.我们还会回到这个步骤,但现在,我们只需取两根针,将它们插进去。你们掰了一根针或者几根都没问题,因为它们只是一根装在塑料里的小金属针。短的一端插进板里。用一些塑料胶带去固定那些针。

翻转这块板,然后焊接。
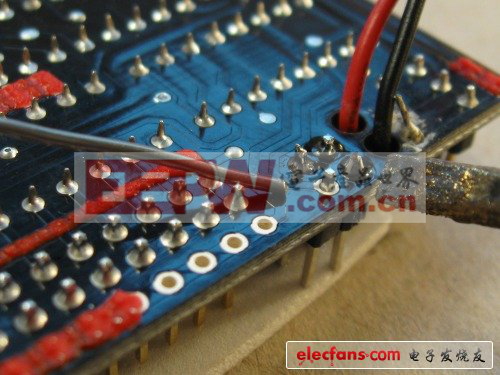
之后,你可以插入任何标准的带有插孔的杜邦线。

然后在焊接一个针在模拟端口0,然后在此接上Sharp。

然后焊接一根针去输出端口O

到此你已经完成了排针的焊接。
就我个人而言,我习惯于在所又的洞里焊上针,但你也可以在迟些时候再进行此项操作,到现在为止我们已经焊上了此项目所需的的排针。
接下来注意的事项:电线和电缆的扩张和替换

按一般的方法连接起两条线是普遍做法,下面是我个人的做法:首先我将两条线拧在一起。然后我将他们焊接好,然后剪掉一些,这时的线一般太长,将其弯曲到任一根线的方向。

当然,在做这些工作之前,我要先切下一小段热压缩管,先把他套在任一根线里面。最后用它盖住接驳的部分。

用火机将它迅速加热,这样会使管子压缩,之后,这就会成为一个很好的绝缘体。

我不认为你会明白我独自拍摄这些照片的难度。你要清楚这需要专注于正确位置,毫无疑问,这些电线也会很热,我自认为这也算是一个好照片。
从现在开始,我希望你能够延长那些比较短的导线,有需要的时候把线连接到电线上,如果你需要连接一些东西到板上面,孔不足够的情况下,你可以增加一个排针。
组合
安装马达

把轮子安装到马达的齿轮上,你在我这里将会看到一个很不同的搭配做法。但主要它是传动马达,在很多工作下他都能运行非常良好。加上一些好的轮子,一切都已经就绪了。
当你把轮子装到马达上,把一根杜邦线切成两半,从线的末端去掉一些塑料,然后将其焊接到马达的接线头上。在另外一个马达上进行同样的操作。
确保没有任何焊锡或者导线碰到马达表面的金属。
一些轮子附带有可选择的橡胶轮胎,把它装上去也许是一个明智的选择,因为如果机器人被卡住了,可以滑动,这在测试和研发过程中是表现的非常好的、
板上芯片
你所拥有的Picaxe 28X1微控制器和开发板,是令人惊叹和激动的小封装。
我仍旧记得我可以用这个微控制器来实现我能想象出的所有动作的时候的那股兴奋。我也希望你能在某种程度上得到这种感觉。坦白说,我们凭借各种各样的电子设备可以使这玩意去做任何事情。即使你对什么都不了解,哪怕电子对你来说就像你我之间那么陌生。
你可以用它去操控你的伺服,马达,运算器,监视距离等机器人需要的任何一个器件,这也是我们将要为之设置的东西。
这个微控制器是一个很长的芯片,你需要在上面编程,开发板上面有其输入和输出所需要的数据。
浏览一下以下这个页面
现在我不期望你能够马上去看这个页面,因为我承诺过让你能够更快的建造机器人、然而从某个角度看来,你读这个页面是非常重要的,了解这个开发板和微控制器。要记住回去看这个文章,为下一步做个书签。
说的够多了,把这个长芯片,也就是微控制器插进去。
确信是以正确的方式插入,在其中的一头有一个标志,在插槽上也有相应的标志,这两者必须统一。
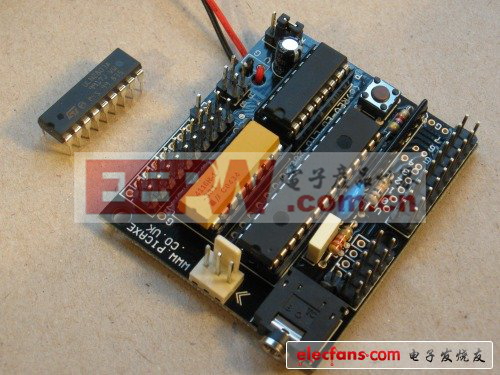
当你买这个开发板的时候,在本应插黄色芯片的那个位置,应该有插着一个黑色的芯片,如下图所示。
像我一样把黑色芯片拿掉,用黄色的代替它。它没有足够的针脚,按照图中确认那一头是不需要插的。
在图中,黄色芯片是位于微处理器和针脚最顶端的那一行之间。这一行会有输出(如果你读上面那篇开发板的介绍,你会明白的。上面的提到的书签,还记得么?)。
我们将要把伺服电机连接到任意一个器件上,这些伺服电机会反馈一些电气噪音回这导线上。这个黄色芯片是一个330欧姆的排阻,它可以减少传回到微控制器的噪音。这是一个简单的直接通过,在两者之间有些电阻,使信号的双路传输减弱,从而保护微控制器。
坦白说,我从没听人说因为伺服电机噪音而烧了微控制器,但因为手册告诉我们需要这样做,同时开发板也有相应的设计,所以我们就做足。
我也听说过这个芯片的黑色版本,其实这有点没趣的,只要有着相同的性能,什么颜色都是无关紧要的。
这颗黑色芯片,在其应用范围被称作达林顿复合晶体管驱动。如果你想了解更多信息,你可以阅读那个手册。就算你没有把伺服电机准确的安装在板上相对的位置,这会是一个非常好的芯片。它可以放大信号,你可以把扬声器接在他上面(即之前安置伺服电机的地方)。同是用“sound”这个命令,你会让它发出巨大的声响,演奏音乐等等。你最好去尝试一下这个。用这块开发板和微控制器的缺点是当你要用这个伺服电机的时候,你要吧达林顿管拿开,乐趣就此而来。但还有更多的待你去挖掘体验。
最后一个芯片是马达控制器,我们需要把它安装到相应的位置。
当你把微控制器安装在板上,它可以开关电源,你可以利用它去驱动马达、然而马达是未经过处理的,它会影响微控制器的输出。另一件需要关注的事是,如果微控制器只可以控制开关。那么怎么操作机器人后退呢?
一个马达控制器可以处理所有这些问题。
这个马达控制器可以驱动两个小马达(每个600毫安),也不会影响微控制器,最重要的是它能使马达后退,这在面向一堵墙时操作会更加便利。
板上面油专门安放一对小马达的地方,使他们驱动这个机器人的正反向运动。
开发板的东西已经组装起来了,微控制器的4,5,6,7路输出已经流入马达控制器。然后经过两根很好的导线流向马达A和B,你只需要将针脚焊接好,轻而易举的事情。
贴士:插入新芯片
那些未用过的新芯片的两组针脚间距一般都比较宽,在插入插槽之前,把针脚捏近。你去尝试去插一颗新芯片,你就会明白我说什么了。
贴士:拔出旧芯片
把一把平的螺丝刀放在芯片的下面,从下往上慢慢的撬,你会发现很容易就能把它拔出来。
事实上,不久以后,你就会希望这个控制器仅仅就是一个控制器。你之后会为其他的伺服电机控制和马达控制买另外的开发板。这些班会从微控制器上得到命令,然后你的机器人可以同时做很多事情。
当然,你可以做这个设备是一个很了不起的事情。
如果没有机器人外壳,做一个外壳
为了尽量简单的完成机器人的制作,我们只需要把所有部分黏合在一起,就可以完工了。
如果你愿意的话,你也可以把它弄得更漂亮。需要强调的是我们使用两个主轮,每个用一个马达驱动。控制它们前进机器人就会前进;控制一前一后,则会原地打转;如果一个动,一个不动,就好像向一边滑动的感觉。
你需要做的事是把电池盒贴在马达上面,利用双面胶。如果电池装在里面,同时轮子足够大能够把它们放在车轴下面,这个东西的就可以自己保持平衡。

一般情况下在前面还会有空间给你装伺服电机的,如果不行你就把它粘在前面。


最重要的事轮子着地,其他部位要差不多平衡。它稍微向后倾斜也不是很重要。

这次我用四个电池的电池槽,因为这比较大,可以轻易把其他东西粘在上面。

如果你用非充电电池,只需要三个电池,有一个小提醒:从旧收音机或其它地方弄一个伸缩天线,截取一段,然后摆在电池盒的一个卡槽里,这样就OK了。
下一步是把这块板装在机器人上,然后连接上所有东西
第一步:把所有电池都拿出来,或者至少拿掉一个,以保证你不会意外烧掉任何东西。我们的机器人没有任何开关。把电池装上去,它就可以动了。现在我们要它停下来,只能拆掉一个电池。
有些电池盒是有线的,有些电池盒上有一个和板上架子相匹配的夹子。如果你有相应的架子,接上去就搞定了。如果你和我一样是有导线的,那就把板上的夹子剪掉,然后红和红,黑和黑连上去。

电池的正极要连接到板上的红线。
把其它东西连到板上
你伺服电机的颜色或许不同 ,褐色或黑色(地线)在外围,红色(火线)在中间,黄色或白色(信号线)在板子的里面。这样说或许你会明白多一点。如果你有读过那个说明。现在你要做的是记住每个线,将他正确连接到伺服电机上面。

安装开发板,连接马达
用双面胶把板子粘在机器人上面。
确保这小插座(板的端部的金属圈)安装好,以确保电缆能够轻易插入。因为你会多次重复这个动作。同是要确保板子的底部没有触碰到任何金属,这会导致短路。把马达连接上之前焊上去的AB针脚。
一个马达的两根导线连到板上的A,另一个马达的连到B,没规定哪个马达要连到哪个接口,我们会编程控制剩下的东西。
我们需要把伺服电机转到中间。当然,你可以用手完成这个过程,但最明智的做法是用微控制器操纵这个伺服电机。因为迟点你可以安装机器人的“脸”,超向前,像微控制器控制的那样。

根据你的电脑系统,下载相应的软件以写程序。

安装驱动和下载线,把下载线插进板上的接口。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码