基于MSP430智能小车的设计
3 软件的设计
MSP430单片机实时监控超声波模块传送的信号并对其信号进行避障决策判断,小车在不需要做出避障时沿直线行驶或停止,并且等待定时器的中断信号产生,当需要避障时,小车就向有障碍物相反的方向调整出(左转、右转、倒退并转向)最佳的运行路线,软件主要采用C语言进行编程。主控程序流程图如图4所示。
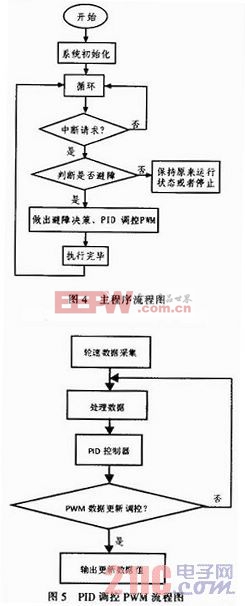
在小车运行的速度调控中加入PID算法来调控PWM对小车的运行速度进行决策控制,能够很好的实现小车运行的稳定性和可靠性,PID调控PWM的程序流程图如图5所示。
4 实验结果
该智能小车做成后对其性能测试:小车的正常运行速度约为0.11 m/s,在遇到的障碍物后做出的避障决策,跟程序中预先设定避障距离15 cm相差不多,根据试验的测量数据,小车预先设定的避障距离和实际的情况上下浮动0~3 cm,到达了预期设计的目标。
5 结论
该设计采用的以MSP430单片机为平台智能小车,能够满足控制要求,采用的超声波避障、PID控制算法以及PWM速度控制,使得小车稳定灵活可靠的运行。后续研究为改进小车实现更高智能化,采用ARM嵌入式、Linux操作系统和DSP,并加入各种智能传感器等来实现小车的更高的人性化智能化。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

