单片机在智能水位监控仪中的应用方案
2.3 报警电路设计
本系统中四路报警电路的设计是采用单片机的I/O口加达林顿驱动芯片ULN2003实现的,然后将输出接到继电器的控制端。ULN2003由7组达林顿晶体管阵列和相应的电阻网络及钳位二极管网络构成,具有同时驱动7组负载的能力,是单片双极型大功率高速集成电路。继电器选用的是G6B-1174P型号的产品,24V供电电压。电气内部结构连接示意如图3。
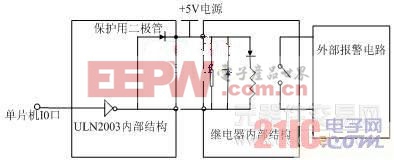
本系统设计中采用四路继电器信号输出报警,包括高水位一、高水位二、低水位一、低水位二,这四个报警水位高度可通过下位机按键或上位机界面中人为设定和修改。以高水位一为例进行说明,当水位值在高水位一和高水位二之间时,单片机发出开关量控制信号,使其对应的继电器常开触点接触导通,具体报警方式可灵活选择,可在外电路中串接报警灯或报警铃,当该继电器动作时,相应报警开始(表现为灯亮或者铃响)。
2.4 4-20mA 电流环输出数模转换电路与时钟电路的设计
在微机工业测控现场中,经常会出现待测模拟电压信号与测量设备之间有较远的距离的情况,把该待测模拟电压信号直接通过很长的线路送入测量设备显然是不合理的。通常采用的方法是:在测量现场对待测模拟信号进行放大、滤波等预处理,再经过变换后进行远距离传送,在测量设备附近再反变换成电压信号进行测量。适合工业测控系统远距离传送的信号一般有电流源或频率信号。为了把待测模拟电压信号变换成电流源信号传送,常常使用电压/电流变换电路。本系统采用一种高性能数字模拟变换器AD421,变换器输出信号为4~20mA电流环。
单片机应用系统中,为了使系统具有实时性,需由一时钟电路给系统提供时钟信号(年、月、日、时、分、秒)。我们选用了DALLAS公司的DS1302芯片。水位监控仪中用的主控芯片C8051F021共有两个串行口,该我们的设计中,一个用于与上位微机的通讯,另一个用于与编码器通讯,因此,在时钟模块与单片机的接口设计中只能采用第二种接口方式,即用普通I/O口模拟工作时序。该时钟芯片对时序要求非常严格,时序的确定是跟硬件紧密相连的,芯片内部的寄存器、锁存器等都对时序有严格的要求,所以充分体现了在研制过程中软硬件相结合的重要性。在程序设计过程中也遇到了因时序问题引起的数据传输错误,但最终都顺利解决。
2.5 串行通讯部分电路的设计
在本次设计中,下位机与上位微机通信的串行口部分我们采用了两种通信方式:第一种采用RS-232通信方式;第二种采用了RS-485通信方式。
本次设计中RS-232通信电平是用转换芯片MAX202来实现的。MAX202适用于噪声严重环境下的RS-232通信,每个发送器输出和接收器输入勿需封闭均可抗±15kV静电放电(ESD,Electro-Static Discharge)冲击,MAX202有两个驱动器和两个接收器,MAX202芯片是为在缺少±12V电源的情况下进行RS-232C与 TTL/COMS电平转换而设计的双向转换芯片,MAX202的供电电源是+5V,电平转换速度的最大值不小于120kbps。MAX202芯片的外围器件很少,只需用4个0.1μF的电容,因而进一步降低了成本和减小了占用的空间。
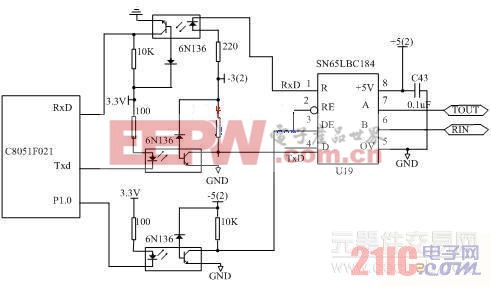
在我们的设计中,采用了SN65LBC184电平转换芯片,SN65LBC184是SN5176行业标准范围内的差分数据线收发器,它带有内置高能量瞬变噪声保护装置,这种设计特点显著提高了抵抗数据同步传输电缆上的瞬变噪声的可靠性。差分驱动器设计集成了由转换率控制(slew-rate- controlled)的输出端,足可以250kbps的速率传送数据,转换率控制比之不受控制可允许更长的无终止电缆运转和来自主干线的更长的短截线长度以及更快的电压转变速度。独有的接收器设计可在输入端处于漂浮(开路)时提供高电平输出失效保护,SN65LBC184接收器包括一个高输入电阻,该电阻等效于1/4单位的负载,允许在总线上挂接最多128个类似器件。SN65LBC184的工作温度为-40℃至+85℃,因此足可以满足工作温度环境要求。
为了防止上位机和下位机的之间互相的干扰,采用光电隔离器件是一种简单而有效的方法。在RS-485的接口电路中我们选用的也是高速光电耦合器6N136。连接电路如图4所示,其中图中电源标号+5(2)表示从DC-DC模块输出的+5V电源。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码