基于波包提取技术的传感器组设计二维成像技术研究
2 时间反演二维成像技术
2.1 传感器阵列的设计
SMART Layer采用传感器数目繁多,动力及成像算法处理复杂,HELP Layer仅采用4个传感器组成整列,极大的减少了动力需求及数据处理的复杂程度。进一步减少传感器数量到3个,使得成像需要的动力及算法进一步简化。
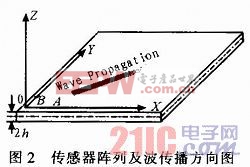
设计传感器阵列采用图2所示的组合方式,传感器O作为发射接收两用传感器,传感器A、B只接收不发射。3个传感器组成一个以传感器O为顶点的等腰直角三角形,传感器O中心到传感器A、B中心的距离为R。
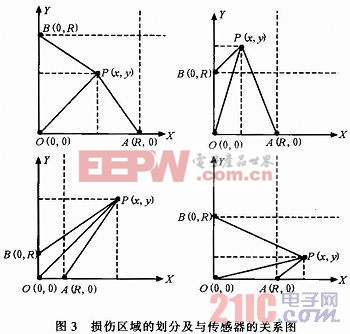
在对构件进行探测时,仅考虑平面目标。假定探测器进行探测时置于探测物体的某一特定位置(如物体的左下角),则整个探测区域可以根据探测器的位置由以A、B为垂足,垂直于坐标轴的两条虚线划分为4个区域,如图3所示。损伤点在每个区域的位置与探测器位置的关系如图3所示。在每一个区域内,损伤点和探测器的位置关系都遵循一定的几何关系,根据这种几何关系,可以精确定位损伤点的位置。
2.2 物体中波速的测定
用传感器O发射,传感器A、B同时开始接收,记每次测量从传感器O发射到传感器A、B接收的时间差分别为△τ1i,△τ2i(i=1,2,…,N)则在物体中的波速用式(8)计算:

2.3 时间反演成像
传感器O、A、B同时开始工作,则传感器O发射一个信号后,传感器组接收到3个不同的检测信号,对3个检测信号分别进行波包提取。传感器O提取的波包为各损伤点反射波到传感器的时延,记作△τ0i(i=1,2,…,N),对传感器A、B而言,根据三角形三边关系两边之和大于第三边,则首先接收到的波包应该是由传感器O直接发射未经损伤点反射的信号(不考虑损伤点在OA、OB上的情况),可以直接滤掉。其次才是由损伤点反射经过不同的时延到达传感器的波包,分别记损伤点到传感器A波包的时延为△τ1i(i=1,2,…,N),到传感器B波包的时延为△τ2k(k=1,2,…,N)。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码