移动机器人视觉定位设计方案
由于图像序列前后两帧的时间间隔T 很小,本文用二阶微分方程来描述P 点的运动轨迹。定义状态矢量:

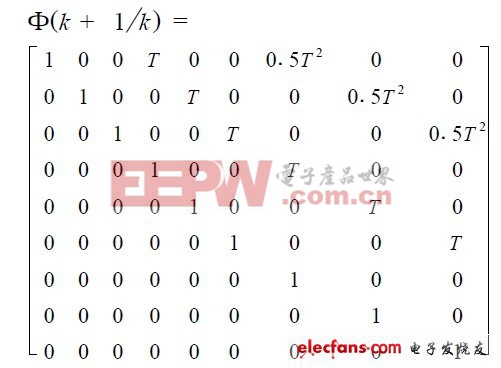
则可以定义状态方程为:
![]()
其中:
V (k ) 为模型噪声, 假设V (k ) 为零均值的高斯白噪声, 其方差阵为Q (k ) = cov (V)。
将式(1) 离散化得:
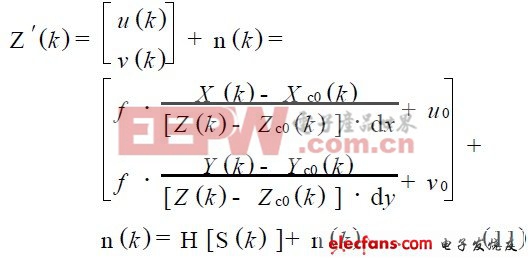
其中n (k ) 为测量噪声。假设n (k ) 为零均值的高斯白噪声, 其方差阵为R (k ) = cov (n)。
则式(10, 11) 组成系统的离散状态方程和测量方程, 当该系统满足可观测性条件:

时, 就可以应用推广卡尔曼滤波对目标的空间位置和运动状态进行估计。其中r ( t) , v ( t) 分别为目标相对于车体的位置和速度, 下标t 代表目标, i 代表成像系统, a ( t) 为任意的标量。
5 实验结果
利用微软提供的V FW 视频处理开发软件包,由CCD 摄像机和相应的视频采集卡获取移动机器人前的场景图像数据, 在Delph i 6 下开发了移动机器人视觉定位与目标跟踪系统的完整程序。本算法在CPU 主频为500MHz, 内存为256MB 环境下, 对帧速率为25 帧?s, 图像分辨率为320×240的共180 帧视频图像进行了实验, 最终实现了对运动目标快速、稳定的跟踪。图3 给出了部分帧图像的目标定位与跟踪结果。
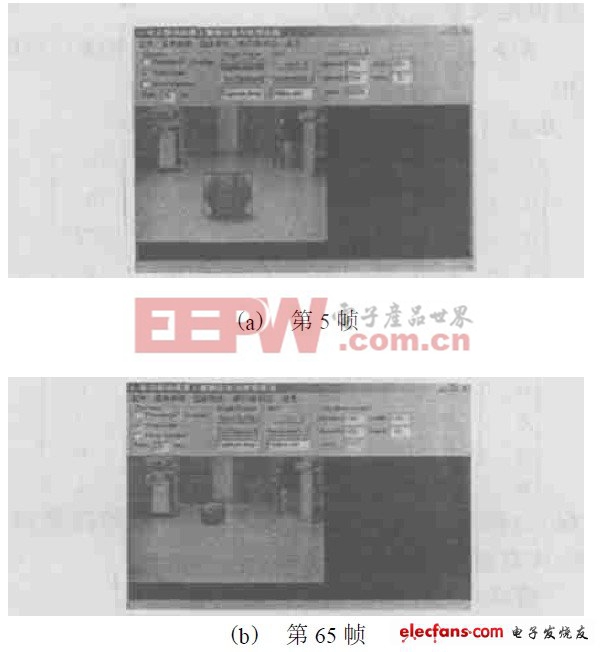
图3 目标定位与跟踪结果。
为了验证本文提出的对目标的空间位置和运动参数估计算法的有效性, 利用获取的目标质心点的位置时间序列对目标运动状态进行了跟踪仿真实验。
由于仿真的相似性, 本文只给出了推广卡尔曼滤波在O Z 方向的仿真结果, 如图4 所示。其中图4(a, b) 分别是观测噪声方差为3 个像素时目标在Z轴方向的位置p 和运动速度v 的估计误差曲线(150 次Mon te Carlo 运行)。其中目标的起始位置为(115, 1, 10)m , 速度为(110, 115, 215)m /s, 加速度为(0125, 011, 015)m /s2; 摄相机运动为实际中容易实现的且满足机动的条件, 其初始位置为( 010, 015, 010) m , 初始速度为( 015, 0175, 110)m /s, 运动加速度为(0125, 0105, 015)m /s2.
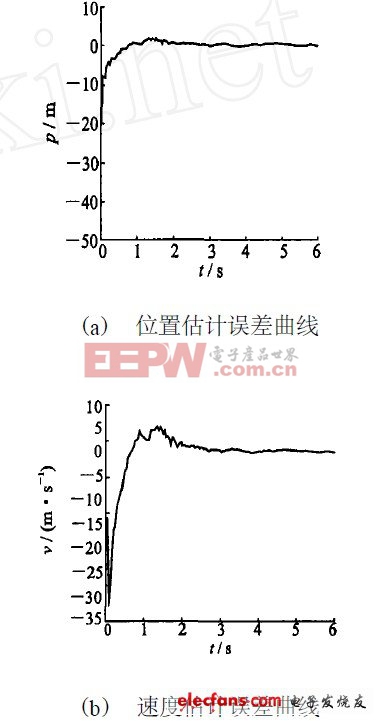
图4 推广卡尔曼滤波Z 方向(深度)的仿真结果
由仿真结果可见, 随着机器人车体的不断机动和滤波次数的增加, 目标位置的估计值在20 帧左右就可收敛到理论真值, 而且抖动很小, 可满足系统快速定位与跟踪要求。
6 结束语
本文对移动机器人的局部视觉定位方法进行了深入研究。二次成像法要求摄像机第二次成像时的位置要有较大变化, 从而导致利用序列图像所获取的目标位置信息误差较大。与之相比本文提出的定位方法可更精确地得到目标的空间位置和运动参数。这为移动机器人的路径规划、伺服跟踪等提供了更可靠的依据。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码