基于变结构的电机力矩平衡控制系统研究
3.2 控制系统的稳定性分析
通过Lyapunov稳定性理论对设计的控制系统进行稳定性分析。选取Lyapunov函数为:
![]()
所以整个系统Lyapunov意义下的渐进稳定。
3.3 计算控制律
由式(4)和s=ce,c>0可得控制律为:

4 仿真及实验结果
4.1 仿真结果分析
选取BLDCM的仿真参数如下:Ra=0.83 Ω,La=3 mH,J=0.009 kg·m2,B=0.08,kT=ku=0.554;选取控制器参数值为:ε=50,k=1 800,c=1。将以上各参数代入Matlab/Simulink模块进行数学建模仿真。图2示出双电机控制框图。
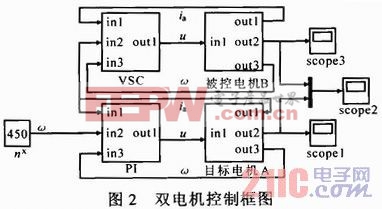
由图可见,目标电机A采用经典双闭环PI控制,而被控电机B与目标电机A的力矩平衡控制采用滑模变结构控制算法。通过仿真运行,得到仿真曲线如图3所示。
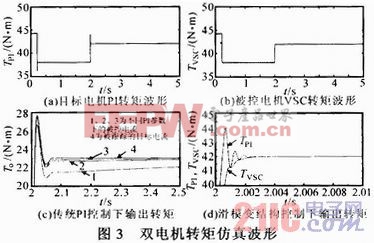
由图3a,b可见,采用滑模变结构控制的电机B可很好地与目标电机A保持输出转矩一致;当突加负载时,与PI控制相比,滑模变结构控制有效地减小了电机输出转矩的超调;由图3c,d可见,与PI控制相比,滑模变结构控制不但降低了超调,而且实现了无误差跟踪。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码