基于ARM的远程无线监控系统的设计与实现
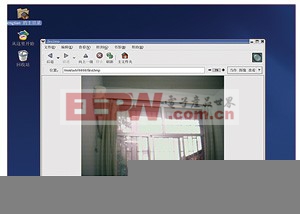
图5 采集的图像
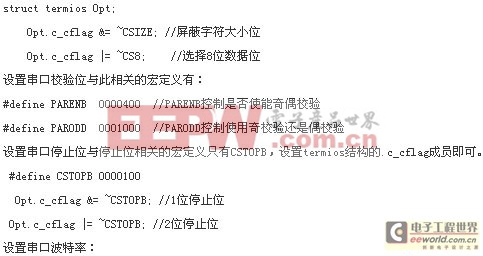
GPRS DTU通过全功能串口与ARM开发板相连接,在arm-linux的指令调度下将ARM采集到的图像通过串口通信传输到GPRS DTU。arm-linux是通过设备文件访问串口的,在访问具体的串行端口时,只需打开相应的设备文件即可。串行端口Port1和Port2对应的设备文件分别为/dev/ttyS0和/dev/ttyS1。若要使用串口进行通信必须在通信两端设置好串口的属性,包括数据传输的波特率、传输的数据格式、是否有奇偶校验位、流控方式等。在Linux下进行串口设置,涉及一个重要的数据结构struct termios,设置串口波特率struct termios Opt,设置串口数据位
串口使用open函数执行打开操作,open( )函数带有两个参数,其中参数1为要打开的设备文件名,参数2为打开方式。它们的含义如下。
O_RDWR:既可读也可写。
O_NOCTTY:告诉嵌入式Linux,该程序不想成为此端口的“控制终端”。如果应用程序不强调这一点,那么任何输入都会影响程序的执行。
O_NDELAY:表示该程序不关注DCD信号线所处的状态,即不管对端设备是在运行或是挂起。如果不设置该标志,则程序会被设置为睡眠状态,直到DCD信号为低为止。
使用close(fd)系统调用关闭串口。关闭一个串口通常会将DTR信号设置为低电平,如果外接GPRS DTU,就会将GPRS DTU挂起。使用write( )函数向串口写入数据,write调用若正确,返回发送的字节数,否则返回-1。从串口读取数据如果在原始数据的模式下对端口进行操作,read( )函数调用将返回串行口输入缓冲区所有的数据。如果没有数据,那么该进程将被阻塞,处于等待状态,直到数据到来,或者到了规定时间和出现错误为止。通过如下方法,能使read( )函数调用立即返回。
系统的实现
本系统监控中心服务器采用PC实现,使用Windows操作系统,使用VC++编写上位机程序,利用TCP/IP通信,输入监控端的IP地址后,上位机可以与监控端通信,接收到传输过来的图像,如图6所示。该系统大概3~5秒传输一幅图像。

图6接收到的图像
本监控系统支持短信和电话唤醒功能,也就是说通过短信和电话拨号就可以对监控系统进行远程控制,使其进入工作状态,进行信息传输。具有连接时机可控功能,支持永远在线、空闲下线和空闲掉电3种工作方式。在不进行数据传输时,监控系统可以进入下线状态,大大节约了通信费用,而在需要重新开始数据传输时,可以用手机给监控系统发送短信或打电话将其唤醒,恢复与数据中心的连接,也可以随时随地发短信对监控系统进行配置,方便管理。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码