数字马达控制系统的量化误差分析与设计
要比较三种数据格式对数值精度的影响,需要监控估算的速度响应与相应的 d 及 q 轴参考电流。将所有的 PI 增益、参数、基本量在全部三种数据格式的仿真过程中设定为相同的有效值。从图3可以看出,16 位定点版本与浮点版本的性能具有极大的差别。
从图3中数值性能的比较可以看出,16 位定点系统有若干个伪瞬态 (false transient) 与振铃,而 32 位系统则没有这些现象。32 位单精度浮点与 32 位定点的结果非常相近。
在现实系统中,这些瞬态现象会产生可听到的噪声及振动,从而引起许多不良后果。尤其不利的是在第一个速度级别出现的估测速度振荡瞬态的衰减以及随后的增长,图3中显示,此次的观察值十分接近 16 位系统的边缘值。另一方面,具有控制响应的 32 位定点仿真系统的性能良好。
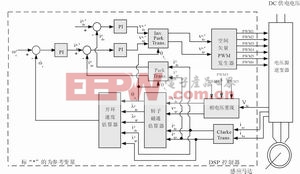
图4 马达控制系统的实现
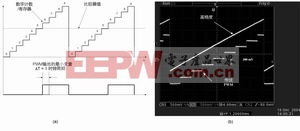
图5 标准 PWM 方案图,以及高分辨率 PWM 与传统 PWM 的示波器图比较
溢出现象一般会发生在通过控制算法进行一系列的加、减法运算时。通过缩放算法来降低实际工作中的溢出可能性通常可达到调整溢出的目的。可使用额外的边缘标签保护位 (margins labeled guard bit) 来完成。控制算法一般在标么系统 (per-unit system) 中进行标准化,以便按比例缩放所有物理变量(电压、电流、扭矩、速度及磁通量等)。使用合适的缩放比例可消除溢出这一量化误差源。造成量化误差的数值计算范例包括乘、除法运算以及三角、指数、平方根等查表数学函数。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码

