全数字智能钳型吊电气控制系统的设计方法
我们用PLC的输出控制,如图2所示
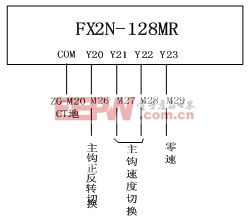
图2:PLC的输出控制
在图2中,Y20为正反向切换,Y21、Y22为速度切换,其速度表如表1:
表1主钩速度表
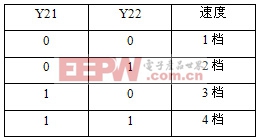
图2中的M26、M27、M28分别对应直流调速装置MentorII的TB3-26、TB3-27、TB3-28接线端,而TB3-26、TB3-27、TB3-28分别对应数字量输入端08.16;08.17;08.18,我们只要令08.16=01.12;08.17=01.14;08.18=01.15,就可以实现用PLC的输出来控制电机的正反向和速度切换。
另外,当主钩控制器故障或主电源断电时,由司机室启动紧急提升开关,紧急提升装置将主钩提起,紧急提升装置由辅助滑电道供电。
三、变压器的选择
表2舞阳钢铁公司轧钢厂钳型吊所用到的动力设备
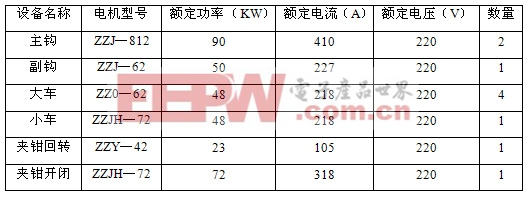
一台钳型吊电机总容量Pe为565KW,由供电手册查得轧钢厂吊车需要系数为Kx=0.35,=0.5;=1.73,最大有功计算负荷P30为197.8kW,由此可得最大视在计算负荷S30为395.6kVqA,按2.5倍过载考虑我们选用1000kVqA的变压器两台,一备一用。变压器为整流变压器6KV/380V。两个高压开关不变,变压器安装在原变压器位置。
结论:
经过近一年的设备运行,到目前为止达到了预期的目的。本系统为数字系统;硬件结构简单;性能稳定;抗高温、抗粉尘、抗震动;平滑调节运行稳定;基于该技术所研制的设备正在申请国家专利。
本文作者创新点:该系统节约能源;提高作业率。其直接经济效益可观,该技术不仅可以在全国钳型吊上应用,还可以推广至其他大型吊车,其市场前景十分广阔。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码