基于DSP的磁存储设备抗冲击技术控制系统
3.1 控制算法
经过深入研究和大量的分析、计算,得出该系统 的机电动力学模型如下:
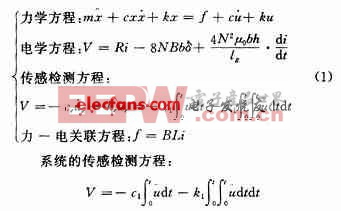
其中:为基础振动加速度;c1,k1分别为与基础振动相关的二次积分和一次积分系数。
设u为的电荷放大信号,根据控制要求,该系统主要利用DSP完成以下运算:
并采用均值补偿法对积分结果进行修正,实现数字系统的控制。将上式离散化则生成:
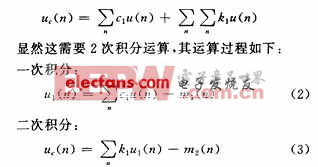
其中:m1(n),m2(n)分别是一、二次积分运算的均值。
3.2 系统软件设计与实现
系统头文件(扩展名为.h)的主要功能就是将DSP内部的各个特殊功能寄存器的名称与其默认地址相对应。在汇编语言的执行过程中DSP指针会直接按寄存器名去访问在头文件中规定过的地址。命令文件(扩展名为.cmd)实际上是DSP的资源配置文件,在PAGE0页(程序空间)他定义了各程序模块的起始地址和空间长度,对片内、外各程序段、中断矢量表的定义等;在PAGE1页(数据空间)他定义了各数据模块的起始地址和空间长度,如对各种参数、片内、外 66数据区的定义等。此外,应注意遵守DSP实际存储器及存储空间的约定。
由于该系统主要是通过DSP的ADC模块和SPI模块与其外围器件通信,所以在软件设计中需要对他们的工作模式进行配置[1]。对于片内ADC的工作模式:首先应该确定ADC的启动模式,然后使ADC达到10 kHz的采样率。为了保证准确的采样率,通过DSP内部计数器计数产生中断作为ADC的启动方式。由于TMS320F243的机器指令周期为50 ns,所以在两次采样时间间隔内至多可以运行约2 000个指令周期,否则就不能完成实时运算。对于SPI模块:首先设定其通信方式为主模式,使数据按时序从SPISIMO管脚移出;然后设定每次传输串行数据的位数、时钟信号方式、传输速率等。由于DSP片外D/A器件为12 b,而DSP的数据总线位16 b,所以必须将最后的运算结果进行相应调整后再由SPI送出。
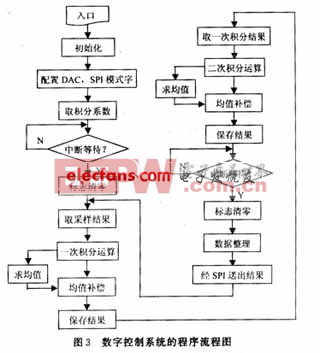
另外,DSP内部的A/D由数值0~1 023(十进制数)来分别对应0~5 V的输入电压信号,所以应由值511来表示零均值点,这一点在均值补偿时要特别注意。系统程序流程图如图3所示。
4 结 语
采用DSP直接实现机电控制是近年才发展起来的一项技术,他比传统控制方法具有鲜明优点。实验表明,以DSP为核心的数字控制系统可以实现实时控制,而且低频段的相位误差非常小,同时又可以兼顾较高频段,适用范围大。此外,他稳定性好、精度高,并易于实现复杂模型的控制。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码