DSP帮助实现智能车载安全系统
3 功能实现
3.1 激光测距的功能实现
原理图如图2,假设激光束与摄像头的光轴完全平行,激光束的中心落点在摄像头视域中为最亮点。当激光束照射到摄像头视域中的跟踪目标上时,摄像头就可以捕捉到这个点。

易推导得距离D:

其中:Num是从图像中心到落点的像素个数,Rop 是每个像素的弧度值,Offet 是弧度误差。
算法流程为:首先,启动摄像头,通过摄像头采集视频图像,截取图像;通过亮点检测程序寻找激光所示的亮点,如果存在,测量其距图像中心的像素个数Num ;最后,通过公式计算间距,通过与设定的安全距离的比较,确定是否安全,不安全则发出警报提醒。
3.2 疲劳驾驶检测功能实现
研究表明,人在发生困倦的时候,眨眼速度变慢,眨眼持续时间变长,本系统通过提取司机的闭眼持续时间的长短来判断是否有疲劳发生。
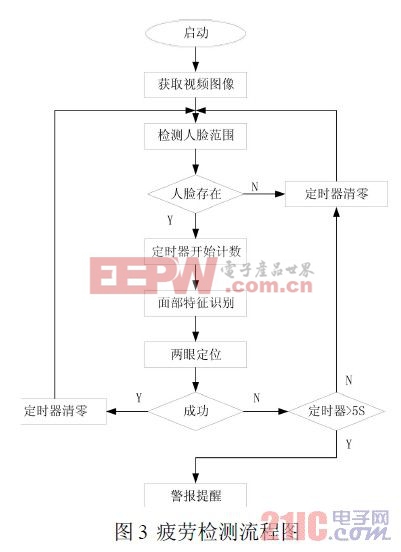
通过检测人脸范围,判断人脸是否存在,如果不存在,定时器清零,返回;如果检测到人脸,定时器启动,开始计数;同时,通过面部特征识别,来定位两眼;认为如果能在一定的时隙内定位到两眼,证明驾驶员并非出于疲劳驾驶状态;此时定时器清零,返回;如果在5S 内无法定位到眼睛,则认为处于疲劳驾驶,此时发出警报提醒。
算法流图见图3。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码