基于Beckhoff嵌入式PC控制器的步进电机群控系统设计
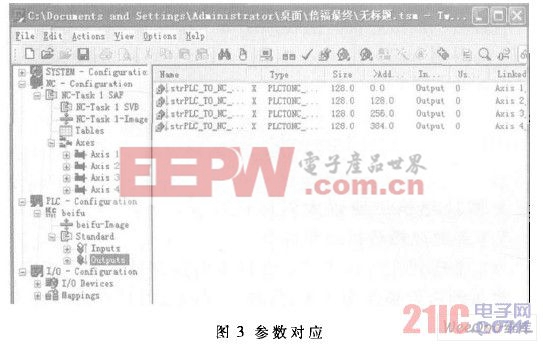
(3)在PLC Configuration 中导入程序,实现程序中的轴控制参数与硬件控制器的对应,对应结果如图3所示。
(4)将硬件配置和编好的程序下载到目标控制器,将系统设置为运行模式,然后通过改变各个MC模块的参数,便可实现对电机的控制。
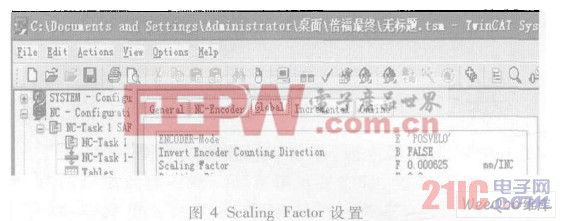
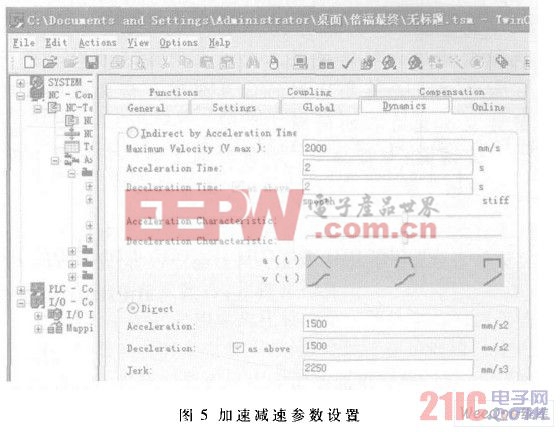
步进电机拖动设备的运动距离主要由电机的步距角、细分数及传递丝杠的螺距参数决定,通过这些参数计算出电机转动运行圈数和设备运动距离的系数,然后将其填入Scaling Factor,便可在程序中直接指定设备的运行距离,由程序计算出电机执行所需的脉冲数。Scaling Factor设置如图4所示。此外,为了保证步进电机运行的平稳性要求,启动和加速时间、速度曲线也可设定载入控制器,以减少软件编程,提高系统可靠性。加减速参数设置如图5所示。
如若对步进电机的细分有明确要求,可通过编程改变控制器的参数或者通过Beckhoff公司提供的KS2000软件对控制进行设置,实现电机的不同细分要求。
通过一系列实验表明,本控制方案完全可以满足系统所要求的技术指标,与使用PLC的控制方案和其他控制方式的多电机控制方案相比,具有以下特点:(1)采用高性能CPU及EtherCAT工业以太网通信等最新技术,可满足高速、高精度要求;(2)系统开放性好,易于扩展;(3)系统拓扑结构简单,与传统控制方案相比较,控制器集成Ethernet接口和EtherCAT接口,输出模块直接驱动步进电机,大幅缩减了中间环节,系统可靠性高,电柜安装尺寸大幅缩小,施工及维护简单、方便;(4)所有产品均以总线连接,配置及诊断功能方便、强大;(5)控制器预装Windows操作系统,可充分利用Windows操作系统带来的优势,如在控制器中直接使用VB、VC面向对象编程语言,数据库系统以及Windows操作系统在组网上的优势、各操作站之间的数据交换。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码