RFID读写器抗冲突问题研究
读写器的冲突是指由一个读写器检测到,并且由另一个读写器所引起的干扰。它主要有三种表现形式。
(1)读写器与读写器之问的干扰
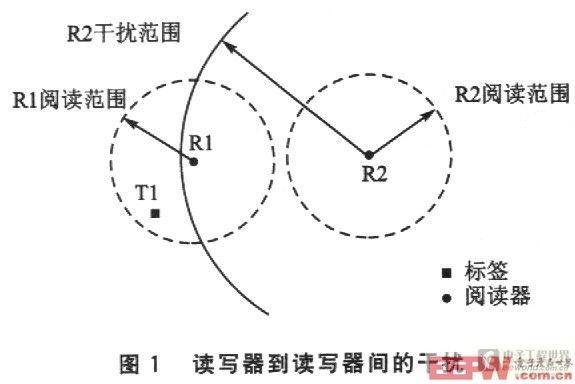
当一个读写器发射较强的信号与一射频标签反射回的微弱信号相干扰时,就引起了读写器与读写器之间的干扰,其示意图如图1所示。读写器R1位于读写器R2干扰区。从射频标签Tl反射回的信号到达读写器R1,很容易被读写器R2发射的信号干扰。这种干扰即使两个读写器阅读范围没有重叠也有可能产生。
(2)多读写器到标签问的干扰
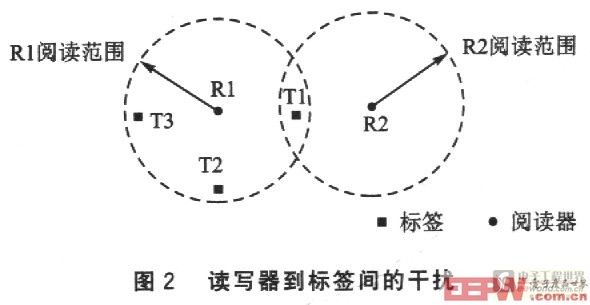
当多个读写器同时阅读同一个标签时引起了多读写器到标签间的干扰,如图2所示,两个读写器阅读范围重叠。从读写器Rl和R2发射的信号可能在射频标签Tl处产生干扰。在这种情况下,标签T1不能解密任何查询信号并且读写器R1和R2都不能阅读T1。因为读写器冲突,读写器Rl能阅读标签T2和T3,但是不能阅读标签Tl,因此,读写器R1指示两个射频标签存在而不是3个。
(3)读写器冲突使载波侦听无效
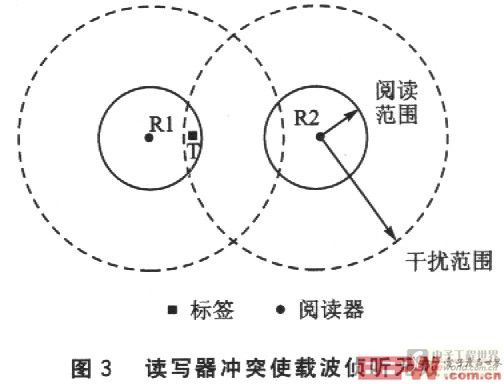
另外一种读写器冲突的情况如图3所示。两个读写器阅读范围没有重叠,但读写器R2发射的信号与读写器R1发射的信号在标签T处干扰。这种情况同时发生在两个读写器不在相互侦听范围内时,使射频识别网络中载波侦听无效。
除了误操作,读写器冲突同时使射频识别系统总的阅读速率减慢,而且这些问题在移动或手持式读写器中更加严重。因此,减少读写器冲突是必须的。
2 相关工作和研究
2.1 读写器冲突的主要特点
读写器冲突主要有下列特点:
①隐藏节点问题是读写器冲突问题的一个方面。两个读写器不在相互侦听范围内而在标签处干扰时,使射频识别网络中正常的载波侦听无法工作。
②当多个读写器询问/发射的信号在某射频标签处冲突时,该点的信号会变得非常杂乱并且射频标签不能再接收任何读写器询问/发射的信号。
③所研究的射频标签是被动式标签,因此标签本身既不能调整也不能主动与读写器通信以避免冲突。射频标签是在被读写器询问信号激活后才能通信。
2.2 相关的多址机制
常用的多址机制不能直接应用在射频识别系统中,因为:
①FDMA。FDMA方式中,读写器使用不同的频率和射频标签通信。由于射频标签没有频率调谐电路,因此射频标签不能选择一个特定的读写器与其通信。如果射频标签增设频率调谐电路功能,将大大增加射频标签的成本,因此FDMA不适合应用在射频识别系统中。
②TDMA。TDMA方式中,读写器被分配不同的时隙,以避免读写器同时询问/发送射频信号。这类似于图论中的图形着色问题,是一个NP-hard问题。在移动式网络中,没有干扰的读写器因为移动靠近而出现干扰,需要重新分配时隙。动态的分配时隙减小了RFID系统阅读速率。
③CSMA。RFID网络,像其他的无线网络一样,存在隐藏节点问题。读写器不在互相侦听范围内在标签处发生干扰,因此仅仅依靠载波侦听无法避免RFID网络中的冲突问题。
④CDMA。CDMA需要在射频标签上增设额外的电路,大大增加了标签的成本,并且分配码给所有网络中的标签是一件非常复杂的工作。因此CDMA不是一种成本低且有效的方案。
2.3 相关的抗冲突机制
常见的抗冲突协议,如RTS-CTS,不能直接应用在RFID系统中,因为:
①传统的无线网络,只有一个节点回发CTS信号给发送者。然而在RFID系统中,如果读写器广播发送一RTS信号,所有在读写器阅读范围内的标签都得回发CTS信号给发送者读写器。这需要给这些CTS信号设计另外的抗冲突机制,将使这种协议更加复杂。
②有可能因为冲突,一些标签(如T1)没有接收到RTS信号而另外一些标签(如T2)接收到了RTS信号。在这种情况下,从T2回发的CTS信号不能确定在读写器的阅读范围内没有冲突。如何确定读写器接收了在其阅读范围内的所有标签的CTS信号,对于读写器是否存在冲突是非常重要的。
2.4 相关的读写器抗冲突方法
2.4.1 UHF第二代标签标准
UHF第二代标签标准是由EPCglobal制定的。该标准把读写器和射频标签的信号传输分割开,这样冲突只能在标签与标签间或者读写器与读写器问发生。这种分割使读写器和射频标签信号在不同的频道上传输,解决了读写器问的干扰。然而,标签没有频率选择性。因为当两个读写器用不同的频率同时与标签通信时,标签不能调谐到特定的频率.所以会在标签处发生冲突。因此该标准仍存在多读写器到标签间的干扰。
2.4.2 Colorwave算法
Colorwave算法是一种基于TDMA分布式算法。该算法规定每一个读写器从0到maxColors中随机选择一个时隙(颜色)传输数据。如果发生了冲突,读写器选择一个新的时隙(颜色),并且发送一个kick(较小的控制包)给它所有邻近的读写器,告诉它们它选择了一个新的时隙(颜色)。如果邻近的读写器有同样的时隙(颜色),它重新选择一个新的时隙(颜色)并发送一个kick。这样一直继续下去。这种转换和驻留的动作就被称为kick。每一个读写器跟踪当前的时隙是什么颜色。
Colorwave算法要求在读写器之间时间同步,同时假定读写器能够检测到RFID系统中的冲突。然而,仅仅用一个读写器检测在标签处发生的冲突是不可行的,除非标签也参加冲突检测,并且读写器移动将会重新分配时隙,重新分配的时隙传播整个网络,将会导致整个系统的无效。
2.4.3 ETSl EN 208标准
ETSI EN 208是一个为RFID读写器开发的标准,它基于CSMA协议的“先听再说”。读写器首先在一特定的小时间段里侦听数据通道里任何正在进行的通信。如果在那段时间里,数据通道空闲,它将阅读标签;如果通道忙,它随机选择一段退避时间。然而,正如前面所讲,读写器仅仅依靠载波侦听不能检测到冲突。
2.4.4 Q学习算法
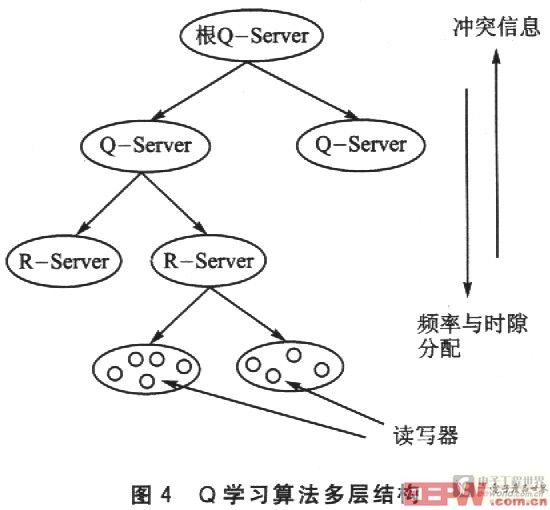
Q学习算法提出了一种HiQ、多层、在线的学习算法。该算法通过学习读写器的冲突模式和有效地分配频率给读写器,动态地解决RFID系统中读写器的冲突问题。Q学习算法多层结构如图4所示。读写器发送冲突消息给读写器级服务器层(R-Server)。然后单个的R-server然后分配资源给它的读写器,这样的方式可使它们之间的相互通信不出现干扰。R-Server通过Q学习服务器(Q-server)被分配到频率和时隙。根Q-server具有所有频率和时隙资源的全部知识,并且能分配它们。Qserver不像R-Server一样,没有单个读写器问约束关系,这种关系通过该层下面的服务器之问的相互作用来推断。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码