基于SVPWM的永磁同步电机矢量控制系统设计
引言
基于正弦波的永磁同步电动机(简称PMSM)具有功率密度大、效率高、转子损耗小等优点,在运动控制领域得到了广泛的应用。矢量控制主要采用脉宽调制(PWM)技术来控制输出电压并减小谐波。其中,SVPWM具有系统直流母线电压利用率高、开关损耗小、电动机转矩波动小等优越性能,因此,PMSM的矢量控制已被证明是一种高性能的控制策略。
本文借助PMSM数学模型,分析了同步电动机的矢量控制原理和SVPWM调制方法,同时借助Matlab强大的仿真建模能力,构建了SVPWM同步电动机矢量控制系统的仿真模型,并通过仿真实验予以验证。
1 PMSM数学模型
永磁同步电机的矢量控制基于电机的dqO坐标系统。在建立数学模型前,可先作以下几点假设:即忽略铁心饱和,不计涡流及磁滞损耗,转子上没有阻尼绕组,永磁材料的电导率为零,电机电流为对称的三相正弦电流。在上述假设的基础上,运用坐标变换理论,便可得到dqO轴下PMSM数学模型。
该模型的电压、磁链、电磁转矩和功率方程(即派克方程)如下: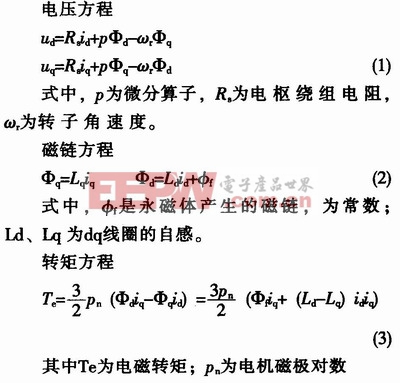
2 矢量控制系统
2.1 矢量控制基本原理
矢量控制的基本思想是在磁场定向坐标上,将电流矢量分解成两个相互垂直,彼此独立的矢量id(产生磁通的励磁电流分量)和iq(产生转矩的转矩电流分量),也就是说,控制id和iq便可以控制电动机的转矩。
按转子磁链定向的控制方法(id=0)就是使定子电流矢量位于q轴,而无d轴分量。此时转矩Te和iq呈线性关系(由上转矩方程),因此,只要对iq进行控制,就可以达到控制转矩的目的。既定子电流全部用来产生转矩,此时,PMSM的电压方程可写为:

通过上面的简化过程可以看出,只要准确地检测出转子空间位置的θ角,并通过控制逆变器使三相定子的合成电流(磁动势)位于q轴上,那么,通过控制定子电流的幅值,就能很好地控制电磁转矩。此时对PMSM的控制,就类似于对直流电机的控制。
2.2 矢量控制调速系统的控制组成
在电机起动时,就应当通过软件进行系统初始定位,以获得转子的实际位置,这是永磁同步电机实现矢量控制的必要条件。首先,应通过转子位置传感器检测出转子角位置ωr,同时计算出转子的速度n,然后检测定子(任两相)电流并经矢量变换,以得到检测值id和iq,然后分别经PI调节器输出交直流轴电压值ud和uq,再经过坐标变换后生成电压值uα和uβ,最后利用SVPWM方法输出6脉冲逆变器驱动控制信号。图l所示是PMSM矢量控制原理图。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码