基于FPGA的双通道旋转变压器测角系统
2.2 驱动及A/D转换模块
驱动电路主要采用集成芯片MAX038CPP,用其来产生正弦波,由于该正弦波电流很小,不能用其直接驱动旋转变压器,还要对其进行功率放大。功率放大电路主要采用集成芯片OPA541AM。
把驱动电路产生的正弦波作为双通道旋转变压器的激励信号,加到其定子绕组上,于是在其粗通道转子绕组上产生正弦波和余弦波,将它们送入AD2S82A,对其进行解码。同时,将旋转变压器精通道转子绕组产生的正弦波和余弦波送入AD2S80A,也进行解码。
通过AD2S82A和AD2S80A的片选端口,可以选择它们各自的分辨率10 b,12 b,14 b,16 b,与其对应的最高跟踪速度为1 040 r/s,260 r/s,65 r/s,16 125 r/s。由于它们将旋转变压器式信号转换成自然二进制代码,是采用一种比率式跟踪方法,输出数字角只与输入正余弦信号的比值有关,而与绝对值无关,因此具有较高的噪音抑制能力,可以减小旋转变压器远距离传输带来的误差。这里AD2S82A和AD2S-SOA都选择12位输出。
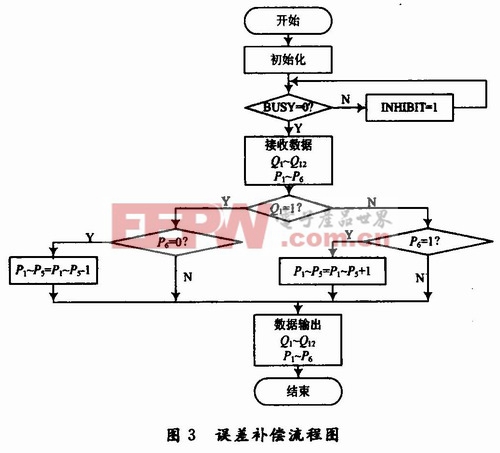
当AD2S82A和AD2S80A正处于运算过程当中时,会在它们各自的BUSY端口,产生一个繁忙信号。用FPGA对这两个繁忙信号进行检测,当两芯片有一块处在运算过程当中时,FPGA发出一个禁止信号,送入AD2S82A和AD2S80A各自的INHIBIT端口,禁止这时读取两芯片的转换数据。这样即能使两芯片工作同步,又能防止误读转换结果。
2.3 FPGA误差补偿和数据组合模块
当双通道旋转变压器粗码盘和精码盘的极数比值为1:32时,旋转变压器旋转1圈,这时粗轴相当于转了1圈,而精轴相当于旋转了32圈,也即粗轴旋转1圈相当于转过360°,而精轴旋转1圈只转过了11.25°(360°/32)。所以,精轴解码后的数字角最高位Q1代表5.625°(11.25°/2),相当于粗轴的P6位。解码后的粗轴和精轴各个位的权重如表1所示。

由于粗轴的后几位肯定不如放大32倍之后的精轴的数字准确,所以粗精数字角组合的原则是,粗精轴都输出12位数字角,但粗轴只取高5位(P1~P5),而精轴取全12位(Q1~Q12)。
由于旋转变压器在转动时,粗码盘和精码盘之间存在各种各样的误差,粗精通道对应位可能不同是变化。即存在粗通道数据变化后,精通道对应位的数据还没有变化,同样也存在精通道数据变化,而粗通道对应位的数据还没有变化,因此还要对解码后的数据进行误差补偿。
通过表1可以看出,粗通道和精通道对应的位只有P6和Q1,它们都代表5°37’30。当P6和Q1变化不同步时,就要进行误差补偿。采用VHDL语言编写误差补偿模块,在FPGA中实现误差补偿,其程序流程图如图3所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码