基于XC866的PWM直流无刷电机的正弦波控制
其中Ux、Uy、Uz为电机端线电压,Ua、Ub、Uc为电机相电压,可见相电压相位差为120度。Ux、Uy、Uz与Ua、Ub、Uc的关系如下:


合并后,Ux,Uy,Uz如下:

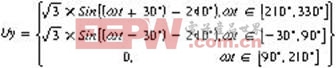
可见采用开关损耗最小正弦PWM时,Ux,Uy,Uz相位差120度,且为分段函数形式,并非正弦电压,而电机相电压Ua、Ub、Uc仍然为正弦电压。且在120度区内端线电压为0,即对应的开关管常开或常关。因此与三相正弦PWM相比,开关损耗减少1/3。
通过控制Ux,Uy,Uz的相位以及幅值即可以控制Ux,Uy,Uz,实现控制电流的目的。
直流无刷电机简易正弦波控制的实现
系统结构
系统结构如图4所示。工作原理如下:霍尔输入信号经过自动滤波及采样处理,得到可靠的换相信号,此信息可被用作估算转子角度以及转速。速度PI调解器根据给定转速值以及反馈转速值计算正弦PWM的Modulation的大小。位置估算单元利用转速以及换相信息估算转子位置角Angle。通过超前角调整单元,补偿超前角Δ,得到Angle。SPWM单元利用Modulation 以及Angle信息生成开关损耗最小SPWM,输出到逆变单元。以下内容介绍了各单元原理及实现。
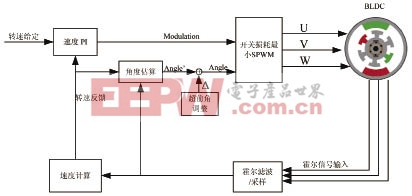
图4 系统框图
开关损耗最小正弦PWM的生成
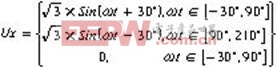
由于Ux,Uy,Uz相位相差120度,因此以Ux为例进行分析。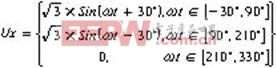
Ux为分段函数,![]() 与
与![]() 为正弦函数且以
为正弦函数且以![]() 对称。仅需实现其中一段,另一段对称处理即可。
对称。仅需实现其中一段,另一段对称处理即可。![]() 的实现:
的实现:![]()
因此仅需要利用0-120度的正弦表即可以实现,即![]() ,其中M为幅值。Uy,Uz的实现与Ux相似,相位差为120°。
,其中M为幅值。Uy,Uz的实现与Ux相似,相位差为120°。
通过控制M和x即可控制电机相电压的幅值及相位。
开关损耗最小正弦PWM控制与霍尔位置传感器的关系
通常直流无刷电机采用霍尔传感器定位转子位置,由于传统控制方式为方波控制,因此3个霍尔传感器即可满足要求。霍尔传感器的位置与转子反电势之间的关系见图5,即霍尔传感器安装于反电势为30°、90°、150°、210°、270°、330°的位置。具体霍尔输出值与霍尔的具体安装方式相关。
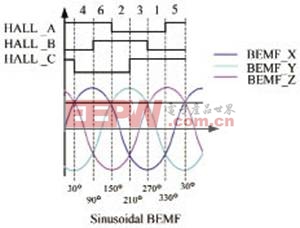
图5 BLDC霍尔传感器输出与反电势之间的关系

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码