燃料电池车离散MRAC电机控制系统的DSP软件设计
这样可以得到参考模型输出。被控对象速度输出y(k)由速度检测电路检测,可得预报误差:

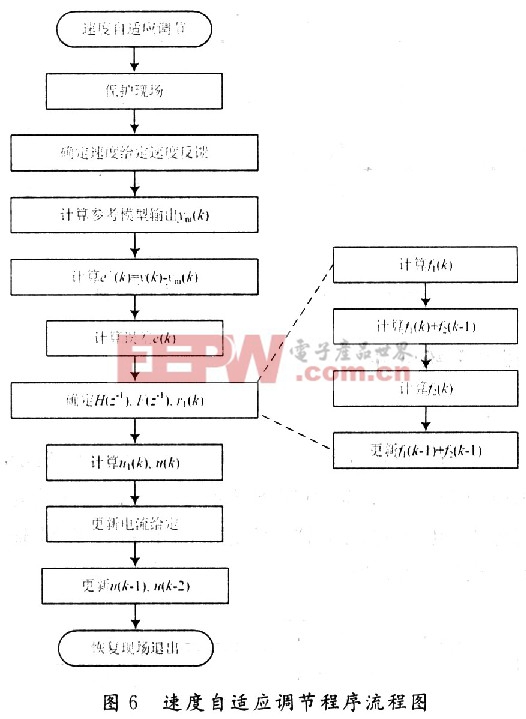
可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。
可得u(k)。根据以上分析编写速度自适应控制程序,流程图如图6所示。
3 结语
自适应控制理论在燃料电池车电机控制系统中的应用,对于提高电动汽车的驱动性能具有较好的效果。本文探讨了在电机DSP控制系统中,离散模型参考自适应算法的实现,对于各种先进的控制策略在电动汽车中的应用进行了积极的探索,对于推动电动汽车产业的发展具有重要意义。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码