I2C总线通信技术在球形机器人双DSP控制系统中的应用
球形机器人控制系统双处理器通信接口方案的选择
笔者在研究过程中曾仔细分析过双DSP架构的硬件结构,发现C6000与C2000硬连接的接口方式可以多种多样,如串口(UART)连接、USB连接、以太网(Ethernet)连接、HPI并行连接、I2C总线连接等。这些方式各有优缺点和各自的适应场合,须考虑自身功能和外部环境的需求来合理选择。表1给出了上述几种信号传输接口的各自性能比较。
从表1中可以看出,I2C为片内总线接口,其接口连接简单可靠,非常适合于短距离高效通信。注意到DM6437和F28015片上都拥有I2C模块,且将双DSP做在同一块PCB板上可以大大减小控制板卡的尺寸,降低电磁干扰,提高整个系统的可靠性。采用这样的硬件设计思路后,片内总线就应该成为首选的通信方式了。而I2C通信是一种很简捷高效的片内总线,其不占用芯片额外资源,除了通信可靠性高外,该接口的硬件设计难度也较小,因此,新型球形机器人控制系统最终确定I2C接口为双DSP的通信接口方式。
球形机器人控制系统的接口设计
I2C总线介绍
I2C总线(Inter IC Bus)是一种用于IC器件之间连接的二进制总线。它通过SDA(串行数据线)及SCI(并行时钟线)两根线,在连到总线上的器件之间传送数据。它根据地址识别每个支持I2C接口的器件。
I2C总线的基本结构
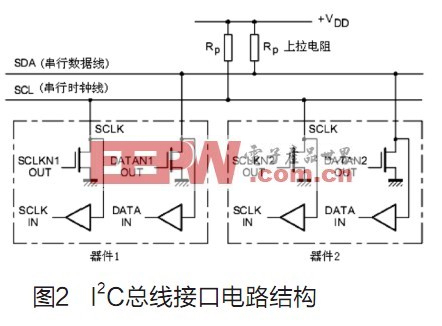
采用I2C总线标准的I2C器件,其内部不仅有I2C接口电路,而且实现了将内部各单元按功能划分为若干相对应独立的模块,通过软件寻址实现片选,减少了器件片选线的连接。CPU不仅能通过指令将某个功能单元挂靠和摘离总线,还可对单元的工作状况进行检测,从而实现对硬件系统简单和灵活的扩展和控制。I2C接口电路结构如图2所示。
I2C总线上的时钟信号
在I2C总线上传送信息时的时钟同步信号是由挂接在SCL时钟线上的所有器件的连接“与”完成的。SCL线上由高电平到低电平的跳变将影响到这些器件,一旦某个器件的时钟信号下跳为低电平,将使SCL线上一直保持低电平,使SCL线上的所有器件开始低电平期。此时,低电平周期短的器件的时钟由低至高的跳变并不能影响SCL线的状态,于是这些器件将进入高电平等待的状态。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码