车载SINS/GPS组合导航系统的在线标定算法
2.2 仿真结果
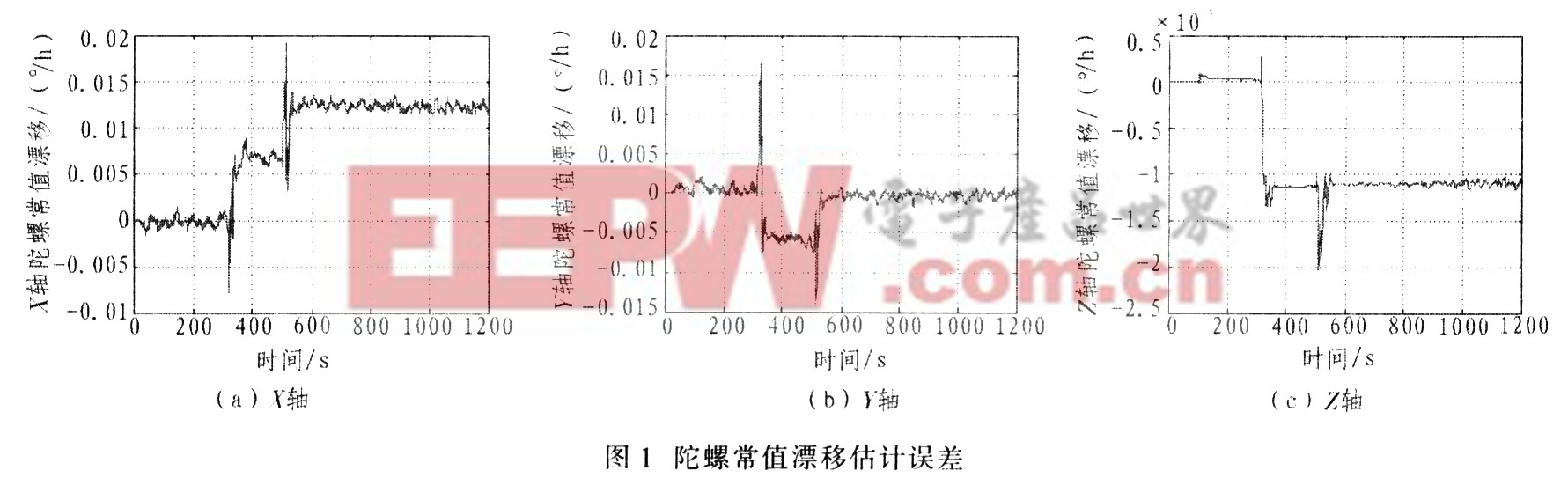
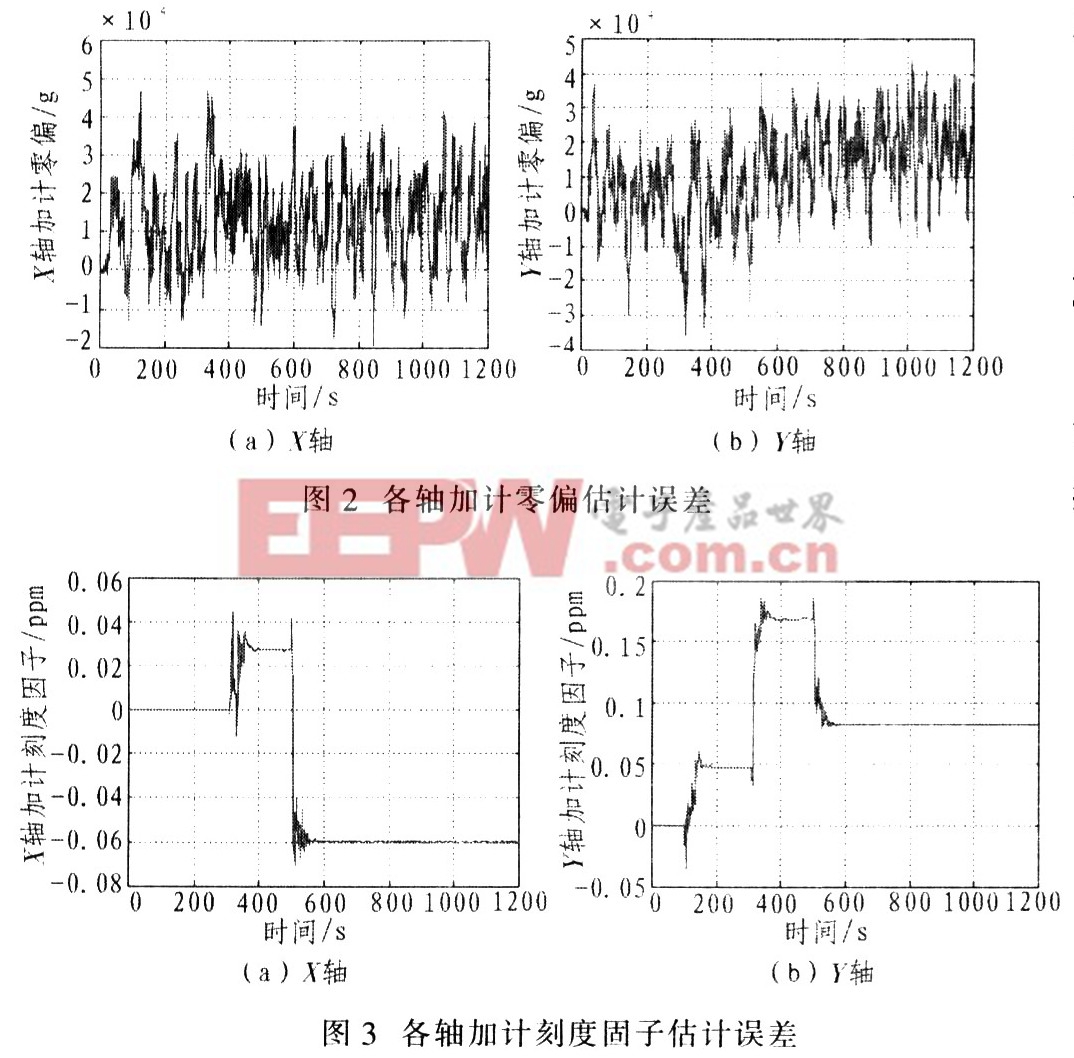
通过编写轨迹发生器、捷联惯导算法、卡尔曼滤波组合导航算法对车载组合导航系统在线标定算法进行仿真,其各项具体仿真结果如图1~图3所示。
2.3仿真结果分析
分析卡尔曼滤波仿真估计结果可以得到:
1)车体进行水平加速度运动时,水平姿态误差开始收敛,且估计效果与加速度大小和持续时间有关。在车体各轴存在加速度输入时,加计的刻度系数误差可估。
2)车体存在一定水平加速度时,相应轴加计零位开始收敛,由于从陀螺漂移到速度误差需经过两次积分,所以使用速 度位置量测对于陀螺漂移估计速度较慢,尤其是天向陀螺。
3)由于使用速度观测,速度误差可快速精确估计,从惯导 系统原理也能得到姿态误差较易得到的结论,但是对于其他 误差估计一般较慢。
3 结论
通过仿真分析。验证车载组合导航系统在线标定算法的可行性。这种方法依靠车辆正常的行驶过程基本估计出相关捷联惯导系统误差量,但还存在一些需要改进的地方,在提高导航精度的滤波方法以及实用性、快速性、便利性等方面,还可考虑用SINS/GPS/OD联邦滤波或自适应滤波实现。
1
2

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码