基于CAN总线技术实现的船舶电站自动控制系统
2.4带 CAN总线的执行器
MCU的 I/O口可以配置为输出,根据需要将相应的 I/O配置成输出后,接到光电耦合单元,其输出再经过三极管驱动继电器实现继电器的输出。执行器的控制为其控制电源经过继电器的触点后送到执行器上,控制其正反运转实现相应的调节,或控制电磁阀回路的通断等。在一些特殊场合,MCU的输出可经过光电耦合后再经三极管驱动MOSFET,实现 PWM的调节控制,或有关的执行器件的动作调节。 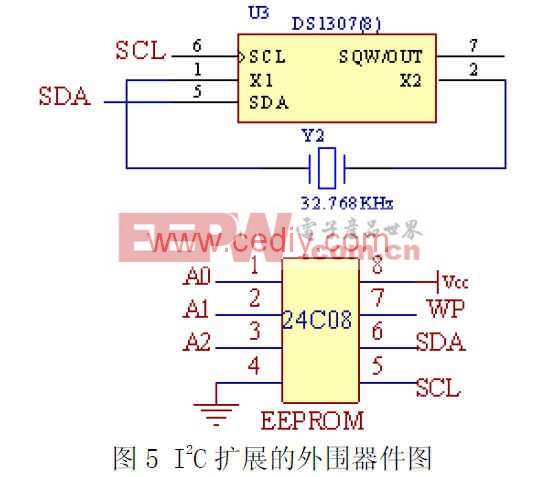
3. 带CAN总线接口的各种控制器
带 CAN总线的控制器 CAN接口与上述 MCU的相同,在控制器中,输入输出不是主要的,主要的是 MCU的运算能力,存储能力,控制能力,显示驱动等,所以考虑使用的 MCU为 PIC系列中较为高端的MCU,其硬件电路也大同小异,除与图 3使用 CAN接口电路相同外,另外为配合需要使用了一些带I 2C的扩展电路,如EEPROM,时钟电路等,如图5所示,其中SCL,SDA为 MCU中自带的 I 2C的接口,定义为时钟线和数据线,A0,A1,A2为相同器件同时使用时的选择信号,由 MCU控制,U3为时钟芯片DS1307,与为时钟源晶振,24C08为I 2C接口的EEPROM。如需要其他功能,可以在原来I 2C总线接口电路上再扩展。在此硬件基础上,通过 CAN接受总线上的信息,各控制器按其需要的功能编制相应的软件,并将相应的输出信号通过 CAN发送到对应的输出 CAN接口模块去。控制器按具体位置和功能分成发动机控制器、自动调压及无功调节控制器、配电保护控制器、同步并车控制器、电能管理控制器等。
4.冗余控制技术
除主要的电能管理控制器 PMU外,设计的其他几个控制器的硬件电路接近,实现的功能不同,但是可以通过软件实现相互间的控制冗余,所以在实际设计中,每个控制器内设计
成两套控制程序,正常情况下,一套本身主要的程序在工作,另一套作为其它控制器的备用在读取 CAN总线上的数据,但是备用的程序不作输出动作。当系统中某控制器故障出现时,CAN总线网络上无该控制器正常工作的心跳信号后,作为它备用的控制器将其备用的程序唤醒工作并输出,以替代故障的控制器,同时在工作的控制器上出现相应的显示。系统设计中各控制相互冗余备用的关系如表 1所示,其中电能管理控制器可以作为其他控制器的备用。
除控制器具备的冗余外,前述 CAN总线均采用双 CAN接口,实际线路也是对应的双 CAN网络,其中一个 CAN总线出现故障后,系统可以自动启用备用 CAN网络,从而实现 CAN总线的冗余控制。
5. 结论
船舶电站控制系统采用分布式结构 , 硬件设计标准化,软件设计模块化,使整个系统设计组合较为灵活,这种设计方法对于其他项目的研制也具有一定参考价值。系统实际运行效果良好,工作可靠,说明 CAN总线技术在船舶电站中的使用是成功的,并可推广使用。
本文创新点:昀初开发的 CAN协议被运用于汽车制造领域,现把 CAN技术移植到船舶电站的控制方面,实现了船舶电站的无人操纵、过程自动控制及远程监控,提高了船舶自动化程度,改善了系统性能。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码