基于模糊控制的机器人寻线控制系统改进设计
(4)模糊合成通过上一步模糊推理,每条模糊规则都得到一个模糊结论,模糊合成是对模糊结论的综合处理,最后得出总的结论。
(5)反模糊化通过各种反模糊化算法,将模糊推理融合的结果即模糊集隶属函数转化为一个精确值。
机器人的自主寻线行走是利用寻线传感器检测机器人偏离导引线的位置,即利用机器人的姿态偏差值调整左右驱动电机的行进速度,从而调整寻线机器人的运行轨迹,使其沿着导引线运行。此特点恰好符合模糊控制的思想,所以机器人寻线系统控制器可以采用模糊控制器。
本模糊控制系统有两个输入变量,分别是前后寻线传感器模块检测到的引导线信息,即iF,iB。模糊控制系统输出为左右驱动电机的速度差,即通过调整两个驱动电机的速度差来调整机器人在导引线上的转角。
根据寻线传感器的配置方式,对前后寻线传感器每一路进行编号,并按照寻线传感器检测到机器人相对导引线的姿态偏差,将传感器的输出转换为16进制的偏差输出值,传感器编号如表1所示。

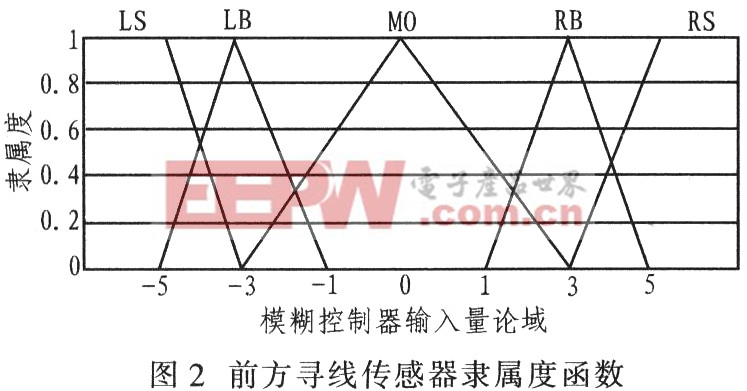
模糊控制器的输入量的语言值模糊子集确定为{LB,LS,MD,RS,RB}。其中:LB=左大;LS=左小;MD=中心;RS=有小;RB=右大。设定模糊控制器输入量论域为{一5,一3,一1,O,1,3,5},定义前方传感器模块(iF)的隶属度函数如图2所示(iB隶属度函数与iF相同)。为计算简单,本研究采用线性函数,从而减少控制器的计算负担,提高数据处理速度。
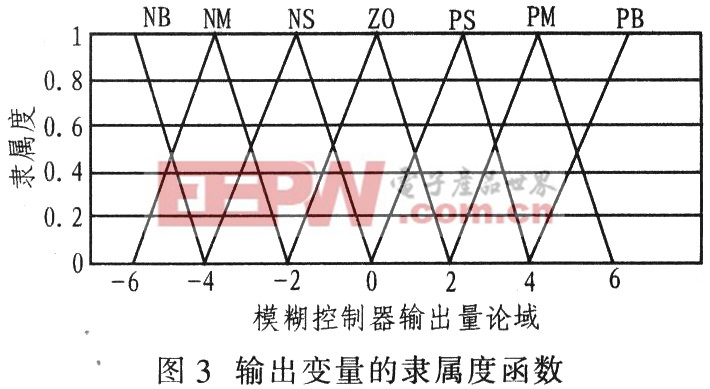
输出量语言值模糊子集选取为:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=负大;NM=负中;NS=负小;Z0=零;PS=正小;PM=正中;PB=正大。设定模糊控制器的输入量论域为[一6,一4,一2,0,2,4,6],定义输出变量(OUT)的隶属度函数(图3)。


加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码