基于磁场检测的寻线小车传感器布局研究
(2)注意到当时,A一定在载流导线的左侧;当时,A、B分列载流导线两侧;当时,B一定在载流导线的右侧。因此:
另两个量可通过(11)式解得。
当道路不是直线时,因为垂直线圈中的感应电压在导线两侧衰减得比较快,所以远处载流导线的形状对它的影响较小。图7是在h=0.1m时,通过数值仿真获得的直道、1m半径弯道、0.5m半径弯道的BX的曲线,可见,半径大小对BX的影响基本可以忽略,因此上述推导仍然可以近似成立。
综上,通过并排放置的两个垂直线圈,可以确定载流导线与两个垂直线圈连线交点在小车坐标系中的位置。
基于混合布置的道路估计
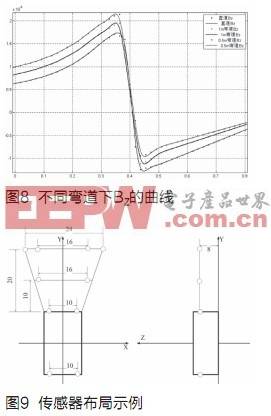
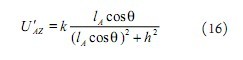
道路形状的变化对BX没有太大的影响,但是对BZ的影响怎么样呢?图8显示了通过有限元数值仿真获得的当h=0.1m时,直道上、半径分别为1m、0.5m的弯道上BZ随x的变化曲线(其中0.4以左是弯道内侧)。从图中可见,弯道半径对弯道内侧不太靠近导线地方的BZ有近乎线性的影响,并且这种影响在相应的区域(图中的0~0.35区间)几乎不改变。因此,考虑在对称安装的垂直线圈旁边同时附带安装一个水平线圈,构成混合布置的检测方式,比如在A、B两点。
假如A两点水平线圈在某一位置实际的感应电动势的有效值为U'AZ。另外,根据(4)式,可以推出在该位置上,相应长直载流导线激发的感应电动势的有效值U'AZ为:

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码