使用基于模型的设计 开发侧翻稳定性控制系统
· 车辆滑移角限制为 +/-11.5 度。
· 最大滑移率设置为 +/-37.25 度/秒。
· Fishhook 操控实验结束时的最低车速设置为 10 英里/小时。
· 仿真结束的时间设置为 10 秒。
为避免因一组不正确的控制器增益值而导致的车辆侧翻仿真提早结束,需要指定仿真时间限制。
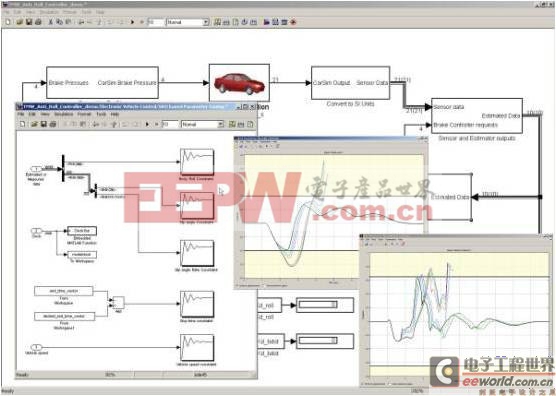
图 2:提供给 Signal Constraint 模块的信号(左侧)以及优化过程中侧翻与滑移率信号的变化(右侧)。黄色区域代表不允许的信号值范围。
每项信号限制都定义了信号的分段线性上限和下限。在优化过程中,控制器增益将被调整,仿真在迭代循环中重复运行,直至仿真信号满足指定边界或优化例程无法解决问题。图 2 显示出在优化算法迭代得到解决方案的过程中侧翻信号和滑移率信号的变化。在解决此类可行性问题时,优化算法将计算被限制的信号与各分段线性边界之间的最大有符号距离。通常情况下,负数值表示相应的限制已满足。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码
