基于SOPC技术的PET瓶缺陷检测系统设计
在各模块中主要介绍以下几个模块:
(1)图像采集模块。图像采集采用的是TRDB-DC2模块。该模块由1片高像素的CMOS图像传感芯片和1个聚焦镜头组成。图像采集通过CMOS Sen-sor采集图像后,再由I2C总线对图像传感器进行配置,然后再根据图像传感器的时序特性来读取采集到的图像点阵。由于采集到的图像点阵是: Bayer色彩空间,因而还要由相应的算法将其转换为RGB色彩空间,再把图像点阵数据存入SDRAM,而VGA显示部分则从SDRAM中读取数据来显示。SDRAM控制器采用双口SDRAM控制方法。图像处理部分也可以从SDRAM中读取数据来处理。其硬件模块如图4所示。
(2)图像预处理模块。从SDRAM中读取数据,采用硬件语言对图像预处理实现图像的灰度变化、阈值分割和二值化处理。其硬件模块图如图5所示。
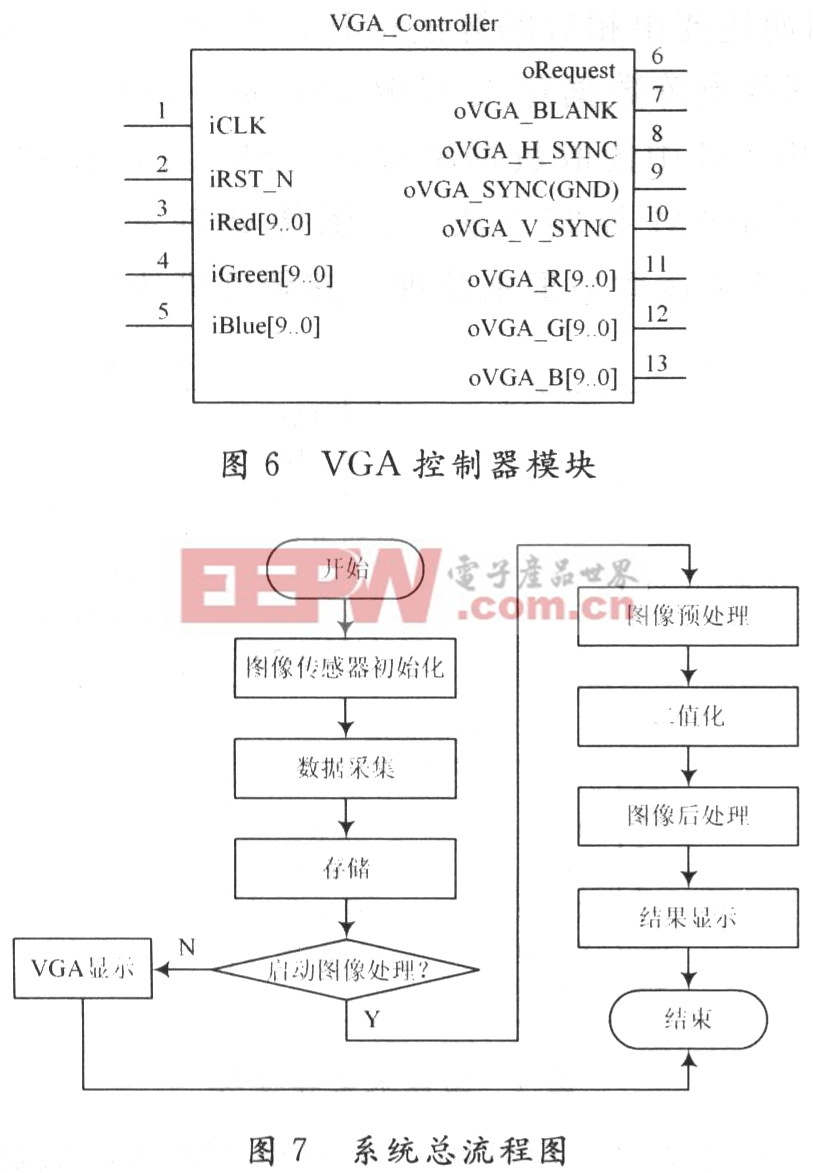
(3)VGA硬件模块。VGA控制器外接一个存储器,以保存当前显示的数据。控制器根据不同时刻在VGA上显示的像素位置,计算出存储器中当前数据存放的地址,并输出存储器地址(oAddress信号)。外接存储器控制器从该地址中读取数据,返回给VGA控制器(iRed,iGreen,iBlue)。 VGA控制器将显示数据输出到D/A转换器上。依据其水平与垂直时序设计的VGA控制器如图6所示。通过VGA controller器件,可以实时将图像直接显示在VGA上。
2 系统软件实现
2.1 软件总体设计
系统配置完成后,摄像头获取图像,送人SDRAM存储器,每帧图像经转换生成图像数据进入预处理模块进行灰度变化、阈值分割、二值化和边缘跟踪,使用硬件语言进行处理和结合NIOSⅡ处理器进行图像的先后续处理和控制,处理后的图像经数模转换在监视器上实时显示。系统软件总流程图如图7所示。
2.2 图像后处理算法的设计
2.2.1 NIOS中使用C++实现图像检测判断准则
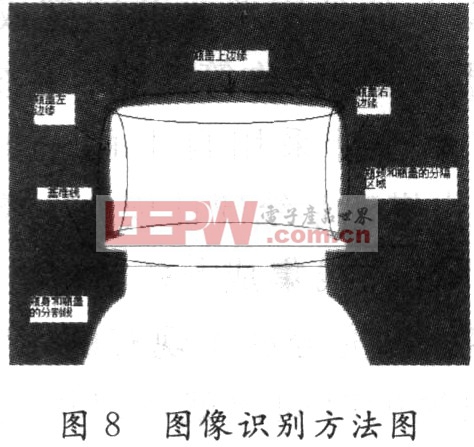
(1)求取瓶盖上边缘到基准线的最大距离,先与标准瓶盖的上边缘到基准线的标准距离比较,判断瓶盖旋封是否合格,大于标准距离,认为瓶子不合格,剔除瓶子。
(2)通过左边缘直线、右边缘直线分别和基准线、上边缘的直线之间的夹角来判断瓶盖旋封是否合格,如果4个夹角都在(90°-δ)内(δ为一个允许的误差,取一个很小的角度),认为瓶子合格,否则瓶子不合格,剔除。
2.2.2 设计步骤
(1)采集经过适当预处理的图像数据后,首先找出瓶盖和瓶身的分割线,该分割线位于瓶颈区域,通过分割线,确定瓶盖所在区域,缩小了后面图像的识别范围,如图8所示。

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码