智能车黑线识别算法及控制策略研究

其中,MVn、MVn-1;当前和上次操作量;△MVn:当前操作量微分;en、en-1、en-2:当前,上次,上上次偏差;KP、Ki、Kd的数值通过实验得到。
经过测试发现,对于舵机控制当它的积分环节ki为O时,小车的表现性能要更好,所以对舵机采用的是带非线性的PD算法。
该算法首先需要知道所采集图像中黑线的转弯斜率(如图4所示),图中直线表示赛道为直道,左右两边的线分别表示左转弯和右转弯时摄像头可能采集到的黑线情形,不同的线表示不同的转弯斜率(slope),在后面的PD控制中我们将用到此斜率。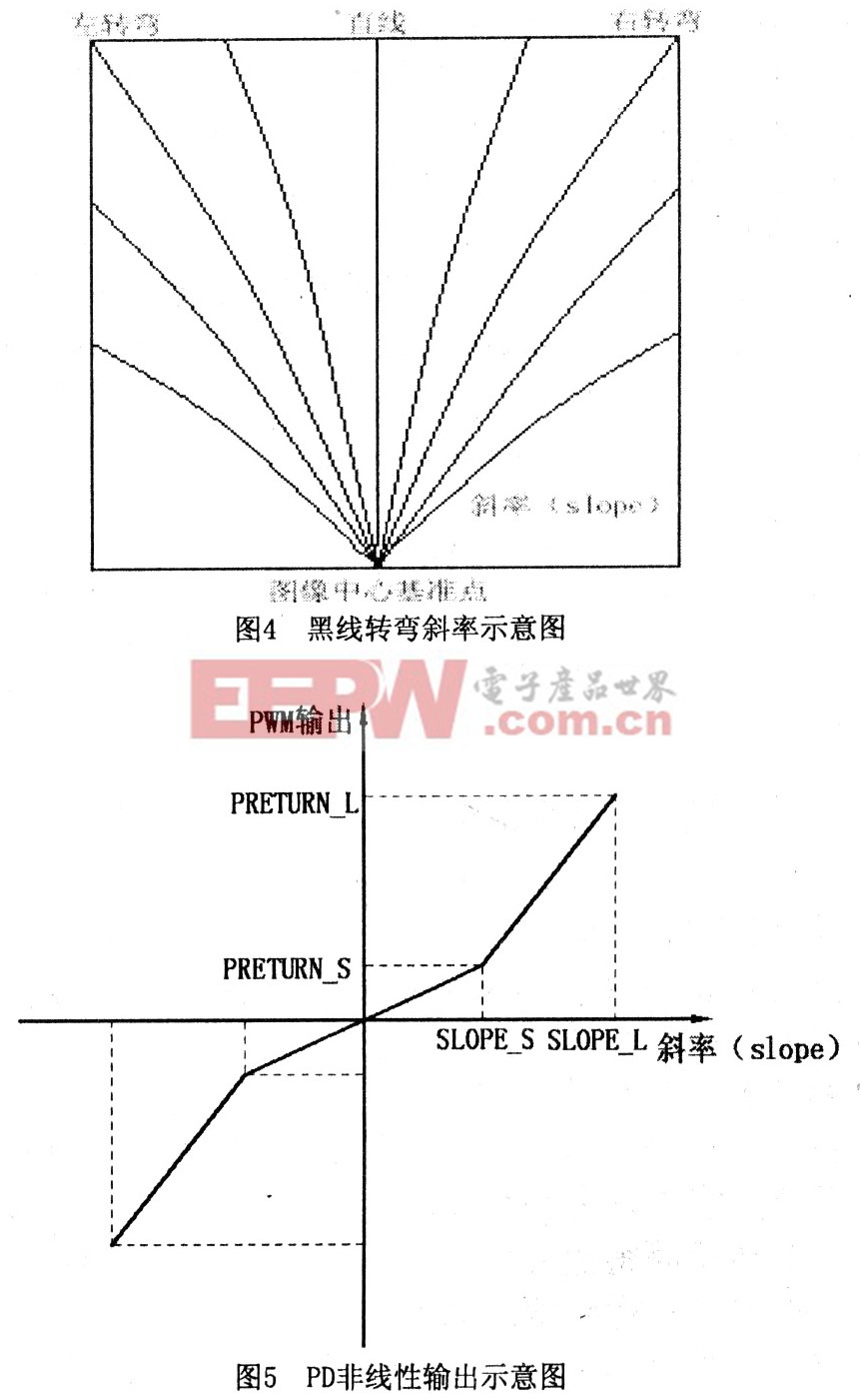
采用的是带有预判的控制策略(如图5所示),具体分为以下几种情况:
(1)赛道一直为直道时,程序如下:

其中,STEER_CENTER为舵机转向中心,g_lOldPwm为前一步的PWM输出,g_sCurE为当前的转弯偏差,g_soldE为前一步的转弯偏差。
4 结论
本文在摄像头已经能够采集较为准确图像的基础上,提出并研究了黑色指引线的边缘提取算法,然后在该算法的基础上决定了舵机转向的控制策略,通过实践证明,采用此种算法和控制策略可以使赛车获得较快的行驶速度和较为可靠的转向性能。
关键词: 策略 研究 控制 算法 黑线 识别 智能 图像采集 边缘检测 PD控制 转向舵机 单片机 算法 控制策略 传感

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码