基于CAN总线的楼宇恒压变频供水监控系统设计与实现
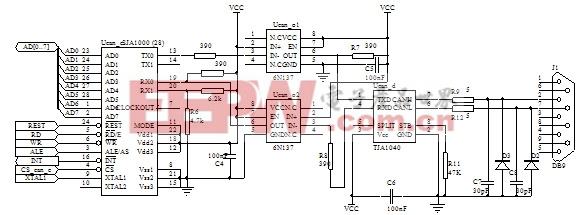
图3 供水系统CAN通讯模块电路原理图
在CAN总线通信功能中硬件电路设计中,采用了PHILIPS公司的独立CAN通信控制器SJA1000和CAN总线接口TJA1040组成的CAN总线接口电路如图3所示。CAN总线节点的发送与接收是通过事先设置验收码和验收屏蔽码可以控制智能节点从总线上接收哪些数据或命令。SJA1000由微控制器89C51通过8位地址数据复用总线和读写控制信号进行控制。SJA1000的中断请求信号INT端连接至89C51的外部中断输入INT0端,CAN通信控制器可通过中断与微控制器进行数据传输。SJA1000的发送输出端TX0与接收输入端RX0、RX1分别经高速集成光电耦合器6N137隔离后与CAN总线接口芯片TJA1040相连,6N137中的光敏器件采用了光敏二极管,可以满足高速数字信号的传输,实现了CAN总线与节点间的隔离传输,有助于提高节点装置的安全性和可靠性。
3 楼宇变频恒压供水监控系统的软件设计
3.1楼宇变频恒压供水系统控制器的软件设计
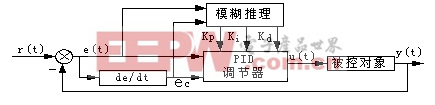
图4参数自整定模糊控制PID控制器的结构图
模糊控制是一种以模糊集合论、模糊语言变量与模糊逻辑推理为基础的计算机数字控制。模糊控制器由三部分组成:模糊化、模糊推理和解模糊。由于恒压供水调速系统由水泵、电机、变频器等多个环节所组成,整个系统涉及较多的参数,部分参数在系统运行过程中是变化的。水泵工作特性具有很强的非线性,管路水头的变化以及电力负载及其特性的变化等都将导致水泵运行工况点的改变,从而改变了系统参数。对于这样的控制对象,常规的PID控制器难以保证系统在任何工况条件下始终具有最佳的控制性能。本文采用参数自整定模糊PID算法,以误差e和误差变化率ec作为输入,可以满足不同时刻偏差e和误差变化率ec。参数自整定模糊控制PID的参数自整定思想就是先找出控制器的3个参数KP、KI和KD与偏差e和偏差变化率ec之间的模糊关系,在运行中通过不断的检测e和ec并将它们作为控制器的输入,由控制器根据模糊控制规则对3个参数进行在线调整,以满足不同e和ec对控制器参数的不同要求,从而使被控对象具有良好的动、静态性能。对PID参数自调整的要求,利用模糊控制规则对PID参数进行修改便构成了参数自整定模糊控制PID系统。参数自整定模糊控制PID控制器的结构如图4所示。
在供水控制的过程中,由于时间滞后现象存在,对系统的控制性能产生不利影响,尤其是时滞较大时。在供水系统中,时滞现象导致系统的动态性能较差。虽然模糊PID控制大大减小了系统参数变化对系统控制性能的影响,但是它没有从根本上解决系统的大时滞问题。在设计供水系统的模糊PID控制器的过程中,我们通过引入Smith预估控制,将两者结合起来设计了具有Smith补偿的模糊PID控制器,取得了较好的应用效果。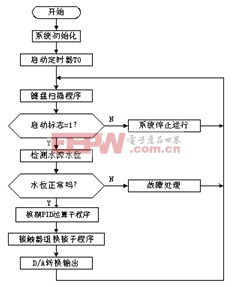
图5 系统主程序流程图
供水系统现场控制器的软件设计大体可以分为三个部分:一部分为初始化,包括单片机的初始化和CAN控制器的初始化;第二部分为现场水压的采样、运算和控制输出;另一部分为作为CAN节点要完成的自身数据发送和来自其他节点(包括上位监控计算机)的控制命令与参数。具体实现上系统软件有主程序、定时器T0中断程序、外部CAN通讯INT0中断程序三部分构成。主程序主要完成系统初始化、键盘扫描、模糊PID运算、水位故障处理等,如图5所示。
在本设计中定时器T0中断是本供水系统进行现场控制中重要的程序,包括管网压力采样、管网压力显示、中值滤波、CAN发送子程序等模块程序。定时器T0当工作于模式1时,最大定时时间为65.536ms,为了实现定时1s。定时器T0中断的流程图如图6所示。现场控制器采样的管网压力,如果要进行远程监视的话,必须通过通讯总线把压力值传送到上位机中,同时,现场控制器也应该接受来自上位机的控制命令,例如:紧急情况下,上位机发出的停止水泵运行的命令等,由于控制信息实时性的要求。本设计中采用了INT0中断方式作为CAN通讯接收信息的程序。INT0中断程序流程图如图7所示。
关键词: 监控系统 设计 实现 供水 变频 CAN 总线 楼宇 基于 模糊PID CAN总线 89C51 远程监控 单片机

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码