基于GPS/北斗卫星技术的无盲区车辆调度系统
出现调度信息时,车载GPS接受机接受GPS卫星的定位数据,计算出自己的地理位置经纬度坐标,然后通过车载台的GSM模块将位置、状态、报警信息发送到控制中心,并存入数据库;当不能捕捉GSM信号时,启用北斗卫星定位系统,该系统具有定位和通信双重功能,将车辆的位置、状态等信息通过卫星系统发送到控制中心。
3.2 车载单元介绍
车载单元分为GPS部分和“北斗”部分。
GPS车载设备选用GSM/GPS一体机,配有标准串口,可输出NEMA-0183 标准GPS 定位数据,另外车载设备可进行语音通话和数据通信,通常情况下,车载台通过GSM短信的方式和控制中心联系。
“北斗”部分选用车载型用户终端,其技术指标为:
波束宽度:俯仰方向:25°~90°;水平方向0°~360°;
频率:采用L/S波段发/收,抗雨衰能力强,对雨雾衰减小于0.3dB;
接收频道数:≥2;
首次捕获时间:≤4秒;
失锁重捕时间:≤1秒;
接收信号误码率:≤10-5;
发射EIRP值:≥13 dBW;
发射频率偏移:≤2×10-7;
发射信号功率稳定度:
±0.5dB(一次最长发射信号周期);
±1 Db(24小时,工作环境条件);
发射信号载波抑制:≥30 dB;
功耗电源:直流10~32V 纹波≤1%,具备电源逻辑控制功能;
待机休眠状态功耗:300mW;
平均功耗:≤6W;
最大发射功率:≤20W;
在能接收到GSM信号时,车载单元的信息(位置以及其他请求服务信息)通过GSM网络传递GPS定位信息和发送消息;在接收不到GSM信号时,利用“北斗”系统的定位通信功能,安装在移动目标上的北斗用户机通过卫星向定位总站发出定位申请,定位总站根据所收到的两颗卫星信号,计算出目标位置的经度和纬度,并通过卫星传回到用户机,用户机得到位置信息,同时,该用户机所属的指挥机也得到该位置信息。指挥机把该位置信息直接传输到与之相连的定位数据服务器、GIS服务器,在电子地图上显示该车辆位置。监控中心人员根据直观的图文信息对车辆实施有效的调度和监控,通过以上过程完成从移动车辆到用户指挥控制中心的数据通信。
3.3 控制中心介绍
本系统采取主控制中心+受理台相结合的C/S结构联合控制的工作模式。主控制中心由数据库子系统、通信子系统、呼叫受理子系统组成;受理台包括通信子系统、GIS子系统主控制中心和各受理台通过专线组成计算机网络,互相交换数据、共享信息,实现群体调度、联网报警、绝对保证安全的高要求。
控制中心结构如图2所示。
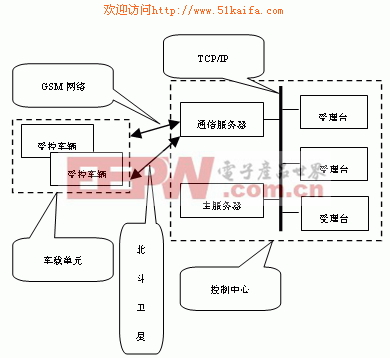
图2 控制中心结构框图

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码