磁阻传感器在车辆航位推算系统中的应用研究
引言
航位推算是最常用的车辆定位技术,它利用方位传感器和距离传感器提供的方位角和位移推算出车辆的位置。距离传感器通常采用里程计传感器;而采用何种方位传感器将直接影响到航位推算系统的精度和成本。用于航位推算系统的方向传感器有陀螺仪、磁阻传感器等。陀螺仪寻北精度高,但价格昂贵、体积大、对环境要求高(如要求载体静止、无振动)、且误差随时间积累,因此不适合于要求低成本的车辆导航。而磁阻传感器具有体积小、功耗低、易于安装,且温度特性好、实时性和抗干扰能力强、误差不随时间积累等特点,因此在车辆航位推算系统中采用磁阻传感器具有较高的性价比。
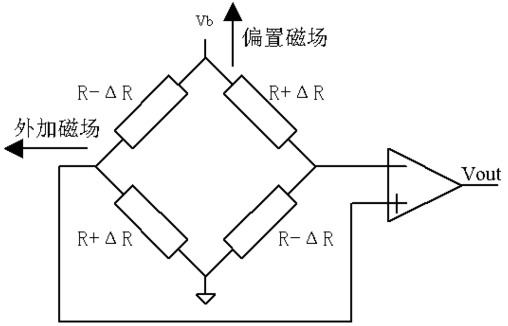
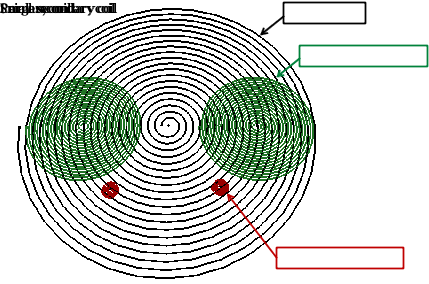
图1 磁阻传感器工作原理图

图2 航向测量原理框图
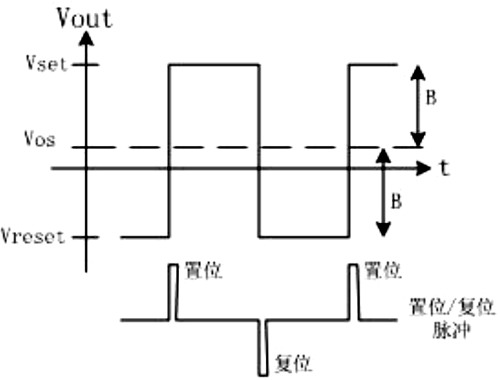
图3 置位/复位脉冲对磁阻传感器的输出影响
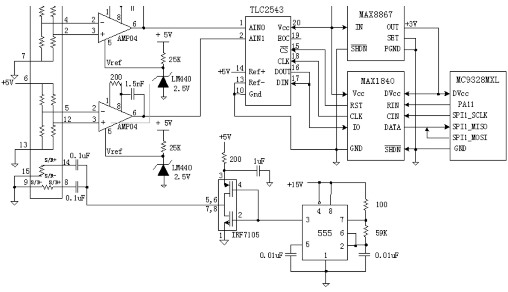
图4 HMC1022及其外围电路图
磁阻传感器原理
磁阻传感器是利用磁原理测量地磁场沿载体坐标系分量,通过数值计算、误差校正,准确地得出载体的航向角。
磁阻传感器工作原理如图1所示。它由四个磁阻组成了惠斯通电桥。其中供电电源为Vb,在电阻中有电流流过,且在电桥上施加一个偏置磁场H,使得两个相对放置的电阻的磁化方向朝着电流方向转动,引起电阻阻值增加;另外两相对放置的电阻的磁化方向背向电流转动,从而引起电阻阻值减少。在线性区域,输出和外加磁场成正比,灵敏度和传递函数的线性区域成反比。
航向角测量原理框图如图2所示。将二轴磁阻传感器沿车辆的东、北向坐标轴安装,即可测量到地磁场沿载体坐标的两个分量。已知地磁场的水平分量H0与地球表面平行,指向地磁北极。令HX和HY分别为东、北向磁阻传感器的输出,则有
(1)
于是,航向角可由下式得出:
(2)
在使用式(2)计算航向角时,由于正切函数的多值性,航向角在大于180°是有效的,并且不允许Y=0的除法运算。
磁阻传感器误差分析及补偿
航向精度主要受以下几个因素的影响:A/D转换的分辨率;磁阻传感器的误差、温度影响和附近的铁质材料;地球磁场的变化。倾角误差在车辆导航中可以忽略不计。
A/D转换的分辨率
车辆航位推算系统要求定位精度达到1°并且能测量0.1°的角度变化。已知地磁场在X-Y水平面上,磁场分量的典型值为300mG。根据航向公式(2),有 ,则。即Y/X比率的1/573的变化会导致航向0.1°变化。由于经A/D转换后的数字量的最高位为符号位,若使用10位A/D转换器,其分辨率为1/512,大于1/573,因此10位A/D转换器不能满足测量0.1°的角度变化的要求。那么A/D转换器应等于或大于12位。考虑到硬磁环境干扰的影响,系统测量的磁场范围考虑为±800mG,则A/D转换器的位数应为12位,可测得的最小磁场为0.8/2048=0.39mG,它是HMC1022可测得的最小磁场量的4倍多(HMC1022可测得的最小磁场量为85Gs)。因此,12位A/D转换器完全满足要求。
磁阻传感器误差
欲使总体航向精度达到1°,对磁阻传感器的噪声、线性度、磁滞、重复性等参数的测量误差应优于0.5°。磁阻传感器的增益误差和偏移,在硬磁校正时都可以被补偿掉,不必考虑。表1给出了这些参数的误差值、这些参数引起的磁场误差,以及和最终导致的航向误差。由表中可知,磁阻传感器若能提供小于0.925mG的磁场误差,对应的航向误差将为0.25°。
温度误差
磁阻传感器的温度系数也会影响到航向精度,包括温度漂移和灵敏度温度系数。
温度变化引起灵敏度温度系数变化时,磁阻传感器在X轴向和Y轴向的输出增益的变化是成正比的。因此,在航向的计算中,此因素可以互相抵消掉。即温度变化对航向精度无影响。
磁阻传感器的温度漂移是不匹配的,会对航向输出有直接影响。温漂是由每个传感器元件的精确电阻值引起的。在磁阻传感器中设计有偏置电流带OFF+/OFF-,可以消除温漂。通过一个交流耦合驱动器,在OFF+/OFF-电流带上产生一个双向脉冲,如图3所示。这两个电流脉冲引起的磁阻传感器的输出是对称的,有一个相同的截距,可以通过运算消除掉。首先,对电流带施加一置位脉冲,测量出此时的磁场强度B和输出电压;然后对电流带施加一复位脉冲,测量出此时的磁场强度B和输出电压,将可消除偏置电压Vos。
附近的铁质材料
航向是以地球水平面东、北两轴向的地磁分量为基础的,磁阻传感器必须测量出这些值,且排除附近的磁源或干扰。干扰的大小取决于磁阻传感器安装的平台材质、连接头和它附近的铁质。
在磁阻传感器周围没有任何物体产生磁场的场合下,成垂直状态的两组传感器测出来的地磁输出信号,随着传感器的360傻贸稣哂胗嘈撸礁鍪涑鲂藕藕铣桑捅涑闪嗽残喂旒#觳獾降卮懦〉谋浠段0.3Gs。但是,如果车辆被磁化或有固定磁干扰的情况下,输出信号的合成就会偏离原点,且不再是一个圆,而是近似椭圆。对地磁场来说,当存在着10倍左右的干扰磁场时,从3Gs开始,车辆被磁化;当有20倍以上的干扰磁场时,在1Gs左右磁化量达到饱和。
对这种叠加磁场的干扰可以通过校正将其补偿掉。通常使用的校正方法是:让安装有磁阻传感器的车辆在水平面上作环形运动,然后找出磁阻传感器X、Y轴输出的最大和最小值;接着确定出原点偏移值;最好根据偏移量进行补偿。
地球磁场的变化
地球的两磁极的连线和地球自转轴之间有11.5募薪(即磁偏角),而且在地球的不同地方,磁北极和地理北极方向之间,都有不同的角度差值,此差值最大可达25R虼耍诤较蚣扑阒校枰跞セ蚣由洗舜牌恰4牌强赏ü虻牡卮牌堑赝蓟騁PS输出的数据中得到。
磁阻传感器外围电路设计
本文采用了霍尼韦尔公司的磁阻传感器HMC1022应用于车辆航位推算系统,航位推算系统平台的处理器芯片采用的是飞思卡尔公司的32位嵌入式处理器芯片MC9328MXL。HMC1022是二轴磁阻传感器,可以输出前后方向、左右方向的方位信息,输出数据经放大器放大后,再由A/D转换将检测到的模拟信号转换为数字信号,经SPI串行通信送到处理器计算出航向角。HMC1022及其外围电路如图4所示。
由于磁阻传感器在制造过程中选定薄膜长度的方向为轴,当玻莫合金薄膜在受到外部强磁场干扰时(大于20G),薄膜磁化极性会受到破坏,传感器特性也会改变。HMC1022使这个问题得以解决,该芯片上有两个阻值为7.7Ω(典型值)置位/复位电流带,对玻莫合金薄膜施加0.5~4A、2s的脉冲电流,通过这一瞬态的强恢复磁场来恢复或保持传感器特性。置位脉冲或复位脉冲对传感器所起的作用基本一样,唯一的区别是传感器的输出改变正负号。由图4可知,555定时器每10分钟产生1秒宽度的低电平时钟信号,该时钟信号控制CMOS开关管IRF7105的导通和截止,从IRF7105的3脚接的1F电容处激励一大于0.5A的脉冲电流。在IRF7105的3脚和电源间串有200的降压电阻起降低噪声的作用。
地磁场的变化引起磁阻传感器的输出电压变化,HMC1022的2、4引脚输出地磁在水平坐标(X-Y)中前后方向(Y轴)引起的变化电压,5、12引脚输出地磁在水平坐标中水平坐标中左右方向(X轴)引起的变化电压。考虑到硬磁环境干扰的影响,系统测量的磁场范围考虑为±800mG。HMC1022的灵敏度为0.8至1.25mV/V/G,磁阻传感器的供电电压为5V,那么任一电桥上最大可能的地磁激励可能为
因此必须将该电压信号放大至A/D转换器能精确转换的电压范围。本文采用了AMP04放大器。要使电压对应A/D转换器模拟输入端0至5V的电压范围,需将电压放大为500倍,在AMP04的1、8脚之间接一个的增益电阻可以达到该放大倍数。在AMP04的6、8脚接的1.5nF电容为放大器提供了1kHz的截止频率。
A/D转换器采用的是TI公司的12位TLC2543。TLC2543中的SPI引脚电平为5V,而MC9328MXL的输入输出脚电平为3V。用MAX1840与MAX8867组合,可以实现两接口高-低电平和低-高电平混合转换。SPI1接口配置为主机模式,TLC2543的片选信号可由

加入微信
获取电子行业最新资讯
搜索微信公众号:EEPW
或用微信扫描左侧二维码